【课题的内容与要求】
目前,我国煤矿行业使用的带式输送机已逐步向长距离、大容量、高速方向发展。因此,对电机驱动功率的需求越来越高,然后采用多电机驱动,以避免单机驱动带来的问题。在实际使用过程中,多机驱动虽然有许多优点,但驱动功率的分布不平衡。这是因为煤矿生产中使用的输送带属于输送带。在输送物料时,如果输送带的每个驱动部分的驱动功率不平衡,会造成严重的不平衡张力,因此传送带将被拉扯、偏离或断开。驱动电机的裂纹和故障。为了解决这一问题,本文提出了一种模糊控制策略,利用PLC和调速液压耦合器调整多机驱动的功率平衡。同时,对整个控制系统的结构进行了研究。本文的控制方案是:通过对输送带速度和各驱动电机定子电流信号的监测,将其传递给PLC控制器,并将输送带的实际速度与给定的速度进行比较,以控制输送机的启动b尔特;通过将监测电流信号与参考电流信号进行比较,以两个信号之间的差异为控制信号,通过步进电机控制液压耦合器的勺子杆上下控制。动态位置用于控制液压耦合器中的充油,使驱动电机的定子电流值彼此接近,以满足电机驱动功率平衡的要求。本文选择西门子PLC300作为硬件选择的主要控制器,选择了控制系统的模块,包括a/模块、高速计数模块、隔离网格等。并对系统硬件各模块的布线进行了全面的设计。在程序设计部分,详细设计了控制系统的主要程序和各种子程序模块。从仿真结果和本文设计的系统来看,采用模糊控制策略实现多机输出功率平衡是可行的。
【前言】
带式输送机是一种用于运输散装物料的运输设备。它具有大容量和工作时间。长途运输广泛应用于轻工业和重工业。随着我国矿业的不断扩大,需要运输距离较长、运输量大、工作效率高的带式输送机,并生产大型带式输送机。目前,在煤矿生产领域,已采用大型带式输送机,但在实际应用过程中,当皮带处于一定的张力状态时,如果皮带是由劣质电机驱动的,就不能满足要求。为了降低皮带的张力和电网的谐波,基本上采用了多机驱动模式。一般情况下,在理想状态下,功率和驱动力的分布比是相同的,但实际上,功率和驱动力的分布比将因各种因素而偏离。这将导致胶带上张力分布不平衡,从而导致驱动电机负载不平衡,在严重的情况下直接导致电机损坏。目前,这种问题在大多数大型带式输送机中都存在。

此外,欧美发达国家在带式输送机开发领域取得了大量的研究成果,无论是在带式输送机的整体设计和控制性能方面都处于相对领先地位。与之相比,我国带式输送机技术的发展相对滞后,我国大型带式输送机的核心技术仍依赖于进口。因此,研究矿带多电机驱动功率平衡控制器,不仅是为了解决煤矿生产中遇到的实际问题,也是为了将先进的智能控制策略应用于实践,深化煤矿带动力平衡控制器。通过实践对控制策略的理解和研究
【方案的比较与评价】
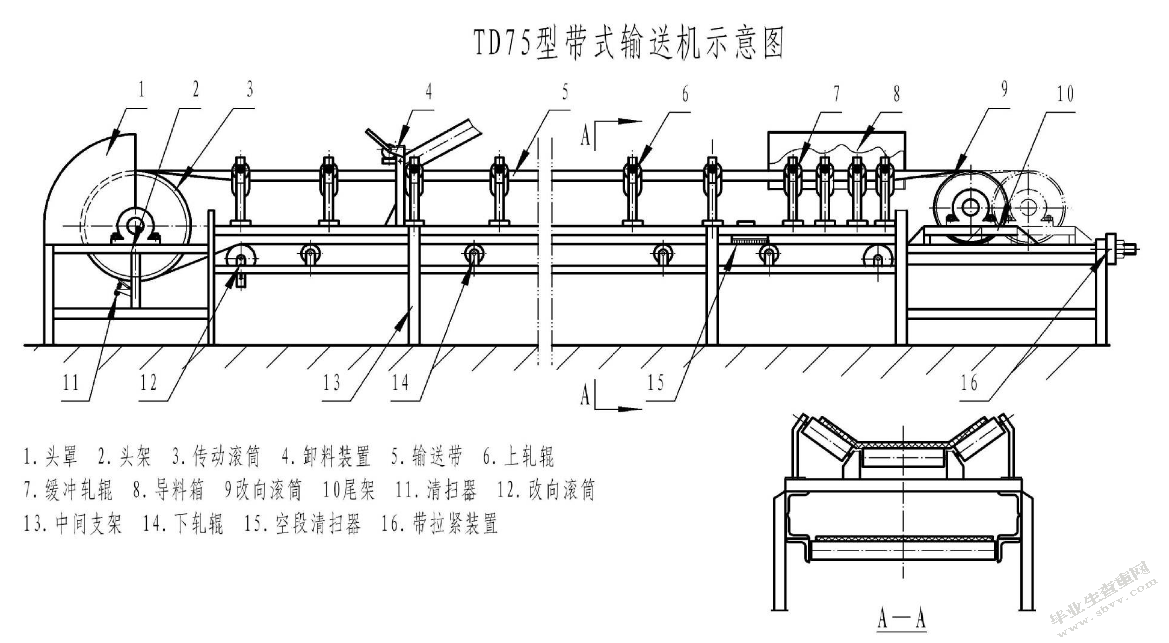
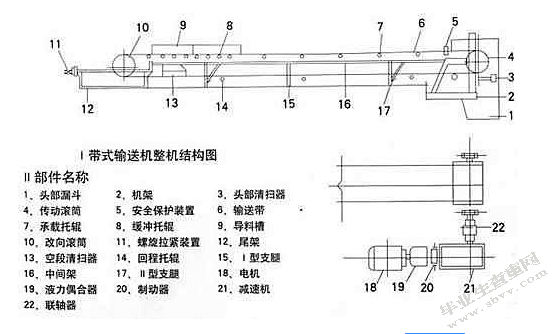
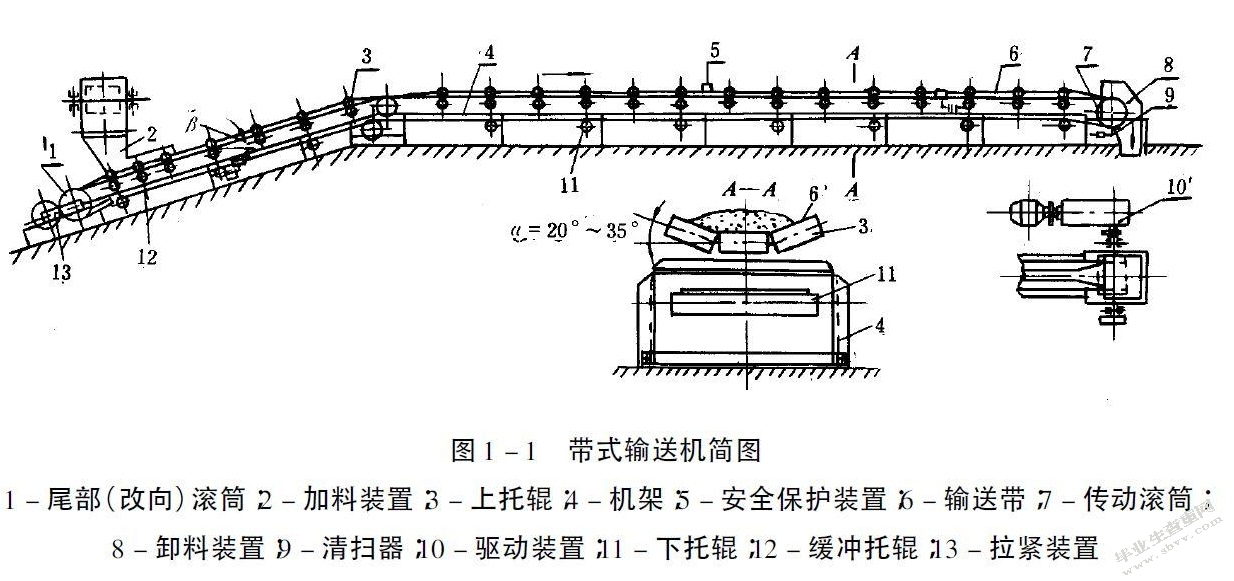
本文的主要目的是控制多驱动输送带的功率平衡,分析多变量模糊控制策略的实际应用效果。具体内容如下:(1)分析了大型带式输送机现有驱动装置的不足,研究了液压称重装置,分析了输送机的组成原理,并对带式输送机的结构进行了分析。.(2)详细介绍了模糊控制策略,包括其基本原理和实时控制方法,以及实现多电机驱动功率平衡的方法。(3)根据控制系统的控制结构和控制要求,对系统的每个部分进行硬件选择和外围接口电路设计。详细介绍了西门子PLC300系列的功能和特点。设计了模糊控制器。建立了模糊控制规则和一般控制决策表。控制电机的负载功率,实现多机驱动功率平衡的控制。(4)结合PLC300软件编程开发和控制算法的特点,进行了程序流程图的设计。
【预期的效果及指标】
(1)利用调速型液力耦合器去调节电机驱动功率平衡的控制方法。此控制方法是先用速度传感器监测输送机的转速,电流传感器监测驱动电机的定子电流,然后将这些信号输送到PLC控制器,在控制器程序中,程序会将实际转速和给定转速比较,将驱动电机的电流与基准电流比较,之后进行相关的运算处理。得出的输出量开始通过步进电机控制液力耦合器的勺杆,以控制其内部的充油量大,从而使电动机的负载功率达到平衡状态
(2)控制系统的硬件结构和程序设计。在硬件系统中,选用西门子PLC300作为主控制器,选择步进电机作为执行机构,选择液力耦合器作为驱动装置,以及对各类转换模块和保护装置等进行了选型。在程序设计中,对控制系统的主程序模块、软启动程序模块、软停车程序模块、驱动功率平衡程序模块等进行了设计
(3)借助MATLAB工具箱进行建模和控制系统模型仿真。本文在仿真之前,首先根据液力耦合器的输入输出特性建立了近似的数学模型,然后再根据前面所确定的控制策略建立模糊控制系统,对整个系统包括驱动电机、液力耦合器、模糊控制器进行了仿真分析。从仿真结果来看,本文所设计的控制策略的仿真效果基本能满足要求,但从长远来看,此方法控制精度不高,实时性也较差。
下载提示:
1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:写文章小能手,如若转载,请注明出处:https://www.447766.cn/chachong/12417.html,