2.1 爬楼机器人的设计要求
比较现有爬楼梯装置,综合分析其各自优缺点。见下表 2.1 所示。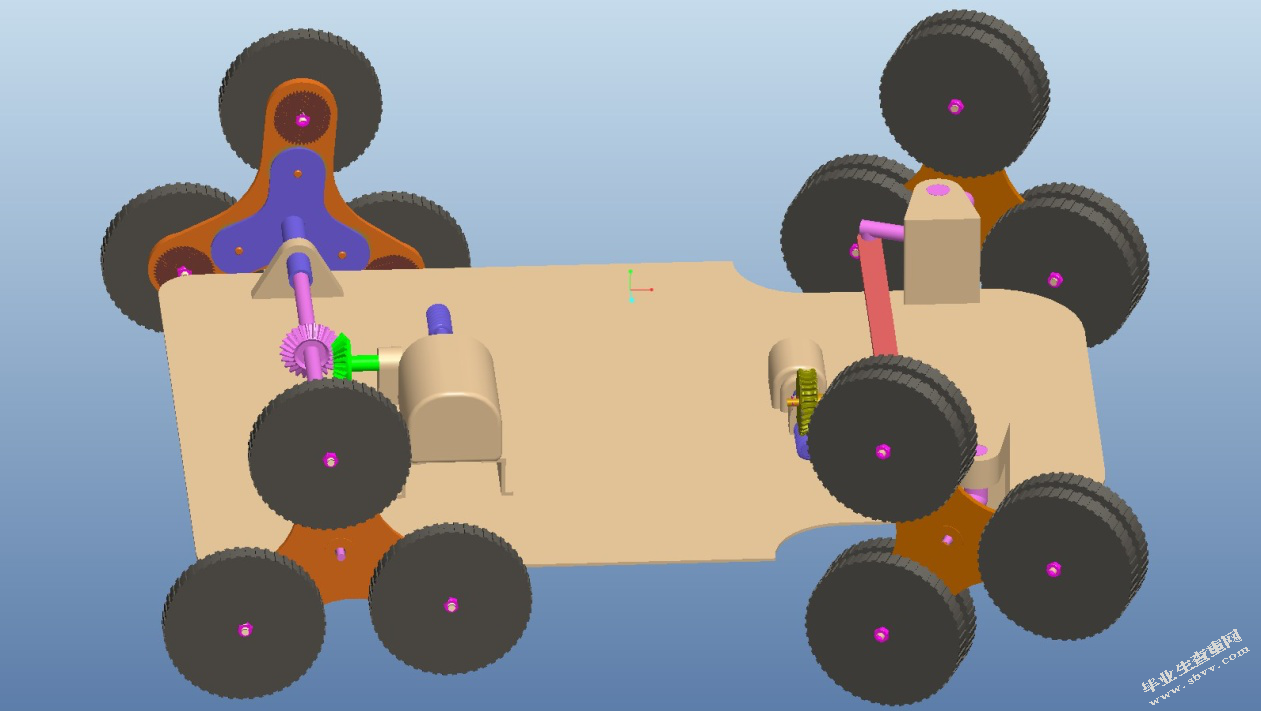

经分析,设计的爬楼梯装置要解决的几个基本问题:(1)爬楼梯装置在爬楼梯过程中的稳定性是影响其实用安全性的重要指标;(2)使用安全性;(3)对于多功能爬楼梯装置,如何实现平地模式与爬楼模式之间的平滑切换也是重要的问题。
2.2 爬楼机器人的总体方案
综合分析后,主题确定攀登楼梯的优势强大的轮式机构。攀爬机器人需要在平地运行并爬楼梯(楼梯规格:210≥a≥140, 320≥b≥220),当然还有转向障碍物和良好的步行轨迹。本文设计的轮式攀爬机器人的整体结构由机器人中部四个轮组驱动的三个部分组成,包括主机架,车轮组,平台和弧体。图2.1显示了机器人三维虚拟样机的原理图。机器人轮的驱动部分位于机身的机箱中,现场的空白部分用于配置所需的控制电路和导航传感器等。由于攀登机器人的特殊要求,设计采用前轮驱动后轮转向设计。身体两侧的轮子具有两个旋转自由度,即轮子的旋转和辐条的旋转。中间两台电机具有自锁功能,采用大减速比的蜗轮减速机系统,前轮连接到小轮驱动轮,实现机器人的前进,后退和障碍。当楼梯当锁轴将后轮小轴和管轴锁定时,最后通过管轴驱动辐条,实现机器人爬梯动作。经过小型动力电动机的体积通过蜗轮减速器系统的大减速比,然后通过齿条连接驱动后轮摆动,实现左右转动作。
第三章 爬楼机器人传动、轮组及转向机构设计
3.1爬楼梯机器人小车的执行电机选择
3.1.1技术指标
根据平地或爬楼等不同状况下的实际需要,以国标GB12996—91电动轮椅车为标准,确定动力系统的参数。国标中对电动轮椅车的主要技术性能[26]规定如表3.2所示。参考表3.2,以及本装置特点(小车轮比一般车车轮都要小一个规格,速度快,其功率也将提高很多),确定本装置的技术指标如下:最大载重为20kg,平地时最大运行速度为1.5km/h,最大爬楼速度为每分钟16个台阶。装置携带24V蓄电池自主供电,电池容量为12安时(一次行程20~35km)。
3.1.2电机选型
1、电机类型选择
多功能爬梯式装置的驱动机构 – 电机是整个系统的核心,它在一定程度上决定了设备使用的安全可靠性。 平面驱动由两个低功率电机驱动,攀爬驱动由两个其他大功率电机驱动。 整个系统以电池为电源,选择步进电机,直流电机和无刷直流电机都可供选择。
(l)步进电机
步进电机具有转矩大,惯性大,响应频率高,可快速起停等优点。 它通常不需要反馈即可对位移或速度进行精确控制,控制系统简单,维护方便。 但是,步进电机的能耗过大,速度不高,而且存在固有的缺点,即在低速旋转振动和噪声方面,不利于整个装置的稳定性。
(2)直流电机
直流电机具有良好的起动,制动和速度特性,具有范围广的速度调节范围,易于平滑调整。 具有控制性能好,响应快的优点,可以满足设备对突发情况的敏感度要求,低速稳定性好,满足攀爬运动时低速稳定性要求。 体积大,过载能力大,能满足设备爬坡,爬升性能要求的步骤。 然而,传统的直流电动机使用换向器和电刷进行机械换向,因此存在相对的机械摩擦,带来噪音,火花,无线电干扰,寿命短等问题,需要定期维护。
直流电机具有良好的起动、制动和调速特性,具有很宽的调速范围,且易于平滑调节。它具有控制特性好、响应速度快等优点,满足装置对突发情况做出反应的灵敏性要求;而且低速时平稳性好,满足了装置在爬楼运动时低速稳定性的要求;起动转矩大、过载能力强,可以满足装置爬坡、翻越台阶的性能要求。但是传统的直流电机均采用换相器和电刷以机械方法进行换相,因而存在相对的机械摩擦,由此带来噪声、火花、无线电干扰以及寿命短等问题,需要经常维护。
(3)无刷直流电机
对于直流电机的传统缺点,使用电子换向电路的无刷直流电机来代替机械换向装置,不仅继承了直流电机的优点,而且无噪音,免维护,可靠性高,性能优越。所以我们使用无刷直流电动机作为设备驱动电机,前轮驱动和后轮转向使用两台普通无刷直流电机驱动。
3.2爬楼机器人的机构设计
通过总结国内外现有的攀登楼梯设备和专利,结合攀登机器人的传动要求,设计采用前轮驱动后轮转向设计理念,采用蜗轮减速机构将动力从电机到车轮,下面本文从传从动力的传输路径来对各机构的设计做详细介绍。
3.2.1 机器人小车传动机构设计
机器人中间主体前半部分用来布置驱前轮轮组运行的传动结构,其传动过程:首先由电机(FW1)提供驱动力,带动蜗杆驱动蜗轮转动,蜗轮与锥齿轮同轴相连,锥齿轮通过啮合将动力传递到前小轴,驱动轮组中心齿轮转动;在上楼梯时,锁轴器工作将小轴和管轴锁紧,小车轮不再转动以防止小车轮滑移,动力通过管轴传递到三星轮,驱动其转动。机器人主体传动结构布局如图3.5所示。
(1)蜗轮蜗杆减速系统
爬楼机器人不管是在平地行驶还是在爬楼的过程中都要求车身平稳,要满足这个要求就必须使爬楼机器人以较慢的速度行驶。蜗轮、蜗杆起到两级减速作用,具有较大的减速比,能够将电动机端的高速转换成前车轴端的低速,并具有自锁功能,给两侧小车轮提供足够的保持力矩,在主体内部电机掉电的情况下,两侧车轮组保持原姿态而不会出现滑移现象。
由于爬楼和转向的功能要求不一样,因此本设计前后轮采用不同的轮组来适应相应的功能实现。
如图3.3所示,前轮轮组采用行星轮式结构,包括传动轴1、管轴2、旋转臂 3、中心齿轮4、过渡齿轮5、驱动齿轮6、轮毂7和小车轮8。传动轴一端与中心齿轮配合,通过轴承空套在转臂 3 上,传动轴上有锥齿轮与之配合,并通过轴承空套在主车架上;传动轴二一端通过螺栓与转臂3固连,另一端与锁轴器固连,并通过轴承空套的主车架上;传动轴与管轴通过轴承相互空套;过渡齿轮5,驱动齿轮6各自通过轴承空套在转臂3和轮毂7上;小车轮8通过螺栓与驱动齿轮6固连,三个小车轮的中心轴线呈等角分布。
1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:写文章小能手,如若转载,请注明出处:https://www.447766.cn/chachong/829.html,