4.1 机器人爬楼梯的控制目标
机器人爬楼梯的复杂性主要有两个原因,一是楼梯形式的多样性,另一种是机器人爬楼梯的固有不稳定性,因此必须根据 楼梯形式和运动控制方法来控制机器人爬梯的过程。
根据任务安排,时间关系,采取程序导航控制系统,验证程序的可行性。 假设楼梯两侧是墙壁,机器人具有使用传感器和执行器与外部环境相互作用的功能,能够实时响应外部环境; 通过到达楼梯角落的平台,程序转动,移动并对齐下一层楼梯; 对于不可预测的事件,如检测到障碍物的形状,大小不等时,应有相对应的举措,确定机器人对障碍物的回避行为等适当响应。 在本文中,楼梯爬行机器人系统的控制目标是使机器人遵循操作人员的步骤,爬上楼梯,避障,越障,顺利地到达目的地。
4.2 机器人的体系结构及系统组成
移动机器人的体系结构是由三个基本模块的组织决定的(传感模块,规划模块和执行模块)。 目前,代表性体系结构可以分为知识体系结构(也称为横向分解),基于行为的体系结构(也称为纵向分解)和混合体系结构三种。
基于知识的体系结构目前是自主移动机器人的控制体系结构之一,如图4.1所示。 这种移动机器人控制体系结构强调,具有环境模型的中心计划器是机器人智能不可或缺的一部分,模型必须准确一致。 因此,传感器信息的验证与模型本身具有相同的重要性。 基于知识的体系结构是是功能模块按信息流排序的结构。 在这个系统中,感知,建模,规划,任务执行和驱动控制的模块是清晰的,前者的输出是后者的输入,所以叫做SMPA(Sense-Model-Plan)结构。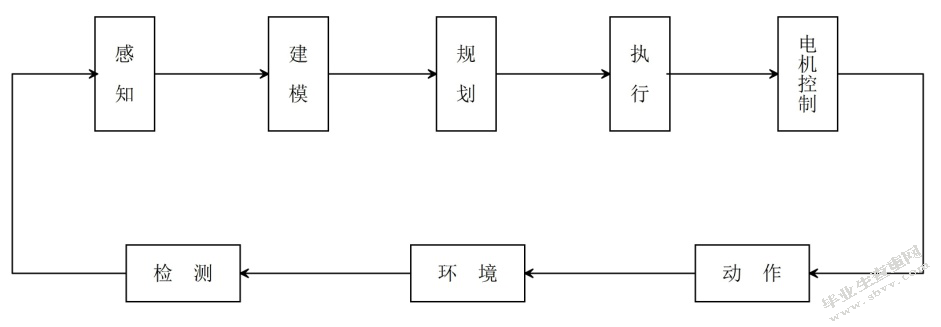

图4.1基于知识体系结构原理图
仪角度测量电路,电机驱动电路,单片机及其周边电路四块组成。 根据整体设计思路,系统由以下部分组成:
(1)红外发射电路 (2)红外接收电路 (3)陀螺仪测角电路 (4)电机驱动电路 (5)单片机外围电路
4.2控制系统主要硬件的选择
4.2.1单片机的选型
本课题选用C8051F310单片机。
4.2.2传感器的选择
本课题选用陀螺仪和红外线传感器。
(1)陀螺仪
移动机器人要能够自主地爬上楼梯,必须在爬行过程中连续不断地、可靠地估计出两个关键参数(如图 6.3):①机器人行驶方向与楼梯的方向的夹角θ,称为偏移角。它用于判断机器人是否径直向上爬行。θ越小越好,
陀螺仪的选型:
本设计选用CRG20-01 型陀螺仪,CRG20-01 型陀螺仪参数如表4.1所示。
(2)红外传感器
楼梯爬行机器人使用两个红外线传感器来测量车体与障碍物之间的大距离(≥10厘米)。红外距离传感器主要用于监测车与前方之间的距离。当没有障碍物时,CCD检测器不接受反射光。当障碍物存在并且障碍物进入安全范围时,CCD检测器检测反射光,红外传感器的反馈由红外障碍物高度传感器的反馈决定。红外高度传感器主要用于监测身体向前方向的高度障碍物。当障碍物的高度不超过障碍物的安全距离时,CCD检测器不会被反射光反射。当前部障碍物高度进入安全范围时,CCD检测器检测到反射光,并且红外距离传感器反馈综合决策障碍,障碍物避免步态。当距离传感器检测到障碍物时,但使用爬坡障碍步态时,未检测到高度传感器。当距离传感器检测到障碍物并且高度传感器也检测到障碍物时,使用避障步态。
红外传感器基于三角测量原理循环。 红外发射器以一定角度发射红外光束,当遇到物体时,光束被反射回来,如图4.4所示。 在通过CCD检测器检测到红外光反射后,得到滤波器的偏移值L,中心矩X和焦距f。 使用类似的三角关系,传感器和物体之间的距离D为D = Xf / L。因此,只要PSD点的测量值的坐标值为L,就可以测量距离。
红外传感器的选型:
此载体机器人不需要精确控制,因此不需要非常准确的距离检测,根据本课题参数设计和他人经验,选择工业控制中常用的GP2Y0A02YK0F 红外测距传感器。 GP2Y0A02YK0F 红外参数距离测量传感器如表4.2所示。
图4.4 红外传感器三角测距原理
1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:写文章小能手,如若转载,请注明出处:https://www.447766.cn/chachong/830.html,