农业采摘机器人路径规划研究的应用领域非常广泛,本章以其在果树种植领域的应用-苹果采摘机器人为具体对象,对其路径规划做具体研究。苹果采摘机器人的实物示意图如图1所示:

图1 苹果采摘机器人的实物示意图
苹果采摘机器人的设计与制造,满足果农果树采摘的现实生活需求,解决了果农收获季节忙、没有时间与精力采摘果实的痛点。果树采摘机器人的出现代替了人力采摘果实,降低了人工采摘的成本,同时有些人力所不方便的枝梢头等问题,果蔬采摘机器人也能解决。采摘机器人的出现,改变了果农收获的方式,也使人们的生活逐步走向智能农业化,科学务农、效率务农、简单务农的理念也得到了体现。
1 苹果采摘机器人的路径规划指标
苹果采摘在工作过程中,需要达到全区域覆盖采摘移动且采摘重复率最低的设计要求。评判指标:
(1)采摘机器人的工作时间,总距离;
(2)采摘机器人的覆盖范围;
(3)采摘机器人区域采摘次数的重复率;
(4)采摘机器人的避障能力;
(5)采摘机器人的实时规 划能力;
(6)采摘机器人的工作效率。
2 苹果采摘机器人的路径规划环境建模
首先建立采摘机器人工作环境。采摘机器人的工作空间为二维空间(以RS表示),工作环境中的障碍物是果树的树干。在机器人运动过程中,障碍物是静止的,大小不改变。网格划分为RS,移动机器人之间的网格移动。无障碍网格是可行网格,带障碍的网格是不可行网格。栅格集包含所有栅格。栅格标识有:直角坐标法和序号法。本文采用序号标识法。
在移动机器人的工作空间,按从上到下,从左到右的顺序,依次编号1,2,3,…,n,每个序号代表一个网格。为了避免采摘机器人和障碍物之间的碰撞,障碍物可以被扩展,和障碍物占据了一个以上的网格在同一时间,作为原始网格。该方法简单实用,能满足环境模型的需要。使移动机器人在路径规划中得以畅通。令S={1,2,3,…,n}为栅格序号集。根据上述对应关系,可知g(0,0)的序号为1,g(1,0)序号为2,直至g(X,Y)的序号为n。路径规划的起始位置、目标位置都为任意的,而且都属于S(但是不能在同一个栅格内)。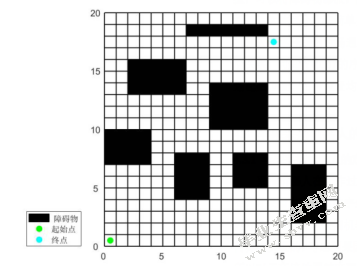
图2环境建模仿真图
3 苹果采摘机器人的路径规划算法
3.1 苹果采摘机器人的定位
采摘机器人在工作过程中,通过传感器探测环境地图信息,并建立环境特征图,对果园内环境用数字坐标参数形成一个准确的描述。通过数字坐标标注室内环境,可以了解采摘机器人的具体位置。采摘机器人的定位算法也就是利用几何算法实现的,考虑到果园环境复杂,存在果树树干,其他植物苗圃等“障碍物”,所以对于环境地图精度要高。采摘机器人机器人利用几何算法进行实时定位,需要的存储空间较小,但是几何算法容易将扫地机器人当做质点考虑,所以对于传感器的要求,我们应该设置一个安全距离,保证不碰撞树干,其他农作物等障碍物。
3.2 苹果采摘机器人的工作路径规划
为了采摘机器人的采摘任务在不发生与障碍物碰撞的前提下可以快速高效的完成果树采摘任务,就必须要求采摘机器人可以安全快速的到达指定采摘位置进行采摘任务。这就要求我们采摘机器人的路径规划要在避障的基础上可以得到最短的路径到达指定位置。经过综合考虑,本文选择了蚁群算法来满足苹果采摘机器人工作路径规划的基本要求。
4matlab仿真实验
4.1 matlab程序设计
算法执行步骤
算法的执行流程如图3所示。
图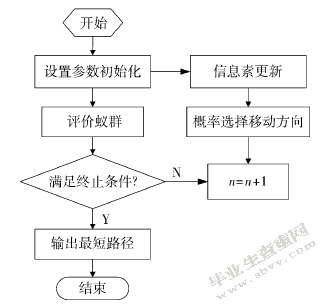 3蚁群算法流程图
3蚁群算法流程图
步骤如下:
(1)初始化:移动机器人的栅格式环境信息用0和1组成的矩阵表示,0表示可通过的栅格,1表示为障碍物占用的栅格。初始化可选路径节点D = {0,1, …, n-1};设置蚂蚁数目m、信息启发因子α、期望启发因子β、信息素挥发系数p迭代次数N。禁忌表Bk(蚂蚁k当前所走过的栅格点)初始化为¤,其中,k=1,2,…,m。选择起始点S和目标点E的栅格号,并将蚁群放在起始点S。
(2)修改Bk:每当蚂蚁k转移一次,就将节点j加入禁忌表Bk。
(3)重复步骤(2)~(3),直到所有没有退出循环的蚂蚁达到终点,然后计算出达到终点的每只蚂蚁的路径长度并且保存下来。
4.2 matlab仿真实验图
经过matlab仿真首先我们得到了在基于蚁群算法格栅建模下的路径规划得到了仿真试验图4.4,然后经过多次的源码调试与参数设置,所能找到的最短路径。由图4.5可知,基于蚁群算法的移动机器人路径搜索模型总体上是收敛的,在搜索开始时有一定的波动性。但随着波动性的变化,搜索路径越来越短。在搜索的后半部分,随机搜索的数目减少,最优路径趋于渐进。由于信息素浓度的正反馈机制,路径搜索在1600次迭代中得到最优路径,但为了保证仿真结果的可靠性,本文基于蚁群算法做了2000次迭代。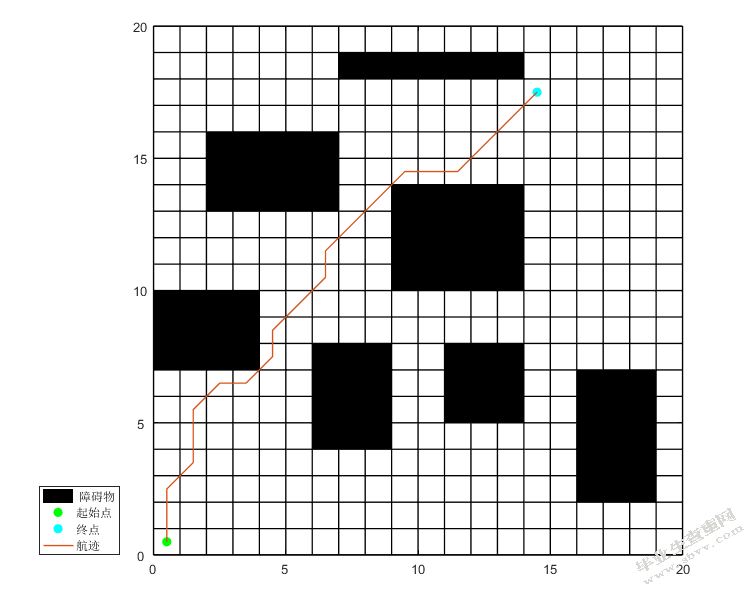
图4.4格栅建模环境下最优路径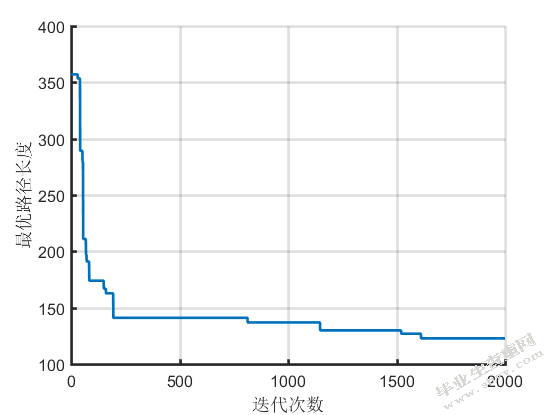
图4.5路径收敛曲线
5 小结
(1)在这一章中,研究了基于蚁群算法的路径规划方法。用网格法描述了移动机器人的工作环境的信息,蚂蚁数目m对蚁群算法的主要参数影响,以及启发因子α,期望启发式因子β,信息素挥发系数p对路径规划仿真实验分析的效率。
(2)蚂蚁个数m对Nc这一迭代次数的影响基本上是根据变化规律的,m的增加,可以提高蚁群算法的稳定性,但当m增加到一定程度时,收敛速度慢,信息量变化趋于平均。也就是说m不可能没有限度的影响收敛性,有其局限。特别要提到的是,蚂蚁数目m越大,运算速度越慢。
(3)信息素挥发系数p太大,一次又一次的被搜索的路径选择的可能性就会大大增加,所以有些从未到过的路径或接信息近于零的路径信息的搜索,影响了算法的全局搜索能力;另一方面来说,如果p比较小,算法的随机新得到提高,而且全局搜索能力也会得到增强,但是算法的收敛速度会大大地降低。
(4)路径参数选取的期望启发因子β在慢慢增大时,最优最短路径的长度逐渐变小,收敛的迭代次数也会慢慢变小。
(5)信息启发因子α如果太大,那么蚂蚁也会很难找到最优路径。
5.1 设计总结
针对农业采摘机器人的路径规划问题,对农业采摘机器人的路径规划、环境建模、全局路径规划算法和局部路径规划算法三个方面进行了分析和研究,并结合农业采摘机器人路径规划研究在农业种植领域的实际应用-果树采摘机器人,完成了本毕业的所有工作,总结如下:
(1)本文介绍的环境模型主要有:几何模型、拓扑模型、三维模型,几何模型是目前应用最为广泛的环境建模方法;
(2)本文介绍的全局规划算法主要有:栅格法、可视图法、链接图法、概率路径图法,栅格法是目前机器人领域应用最为广泛的全局规划算法;
(3)本文介绍的农业采摘机器人的局部规划算法主要有:人工势场法,RRT算法、遗传算法、蚁群算法、A*算法、人工势场法是应用最广泛的局部规划算法;
(4)本文介绍的果树采摘机器人作为农业采摘机器人在智农业种植领域的应用,主要是用蚁群算法设计而成自动农业采摘产品,在蚁群算法的基础上,进一步优化实现产品所需的功能;
(5)农业采摘机器人的路径规划通常都是由全局规划算法和局部规划算法相结合的,每种算法既有优点也有缺点,第三章有所分析,实际应用中,都是取长补短,才能正在实现满足要求的规划路径。
5.2 设计展望
智能化的时代已经到来,“机器人”扮演的角色也越来越重要,不论是生活领域还是工作领域,“机器人”的身影越来越多,各国对机器人领域的研究也越来越重视。
在农业采摘机器人路径规划的研究是一个在机器人研究领域的难点,收获的全局规划和局部规划算法需要更完善的机器人算法的研究方法,希望最终开发出的路径规划算法,无论面对怎样的农业收获机器人路径规划的环境要求,都可以很好的满足。
农业采摘机器人路径规划研究在多方面都得到深入的探索,汽车无人驾驶技术也是基于其部分原理设计的,随着人力、物力、精力等各方面的因素的投入,农业采摘机器人的路径规划将进入一个XXX。对于这一领域的研究,从原有满足贴近工业生产制造逐步也满足生活、工作等贴近人们生活需求的领域。
我们期待农业采摘机器人路径规划研究的成果,给农民的生活和工作以及各个方面带来本质的影响。
1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:写文章小能手,如若转载,请注明出处:https://www.447766.cn/chachong/597.html,