1.1采摘机器人机械部分设计
要设计符合果农采摘流程要求的采摘机器人,首先需要建立完整的机械结构体系和电路控制体系。采摘机器人的机械结构如图2.1所示。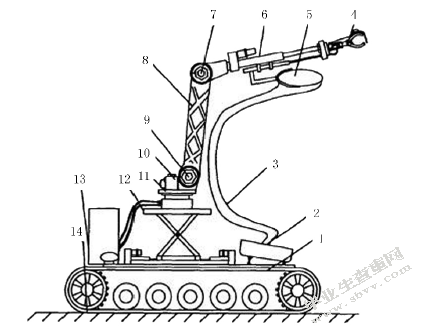

图2.1采摘机器人的机械结构图
如图拥有完整的机械结构体系,其中1.移动平台2.收集箱3.软带4.采摘臂5.水果入口处6.伸缩杆7.采摘臂电机8.转折臂9.转折臂 10左右旋转电机11.转动臂平台12升降平台 13.控制设备14履带.说明采摘机器人有了可以运作的硬件平台;但采摘机器人各部分的运作还需要软件的驱动,因此需要搭建智能电路控制系统。
1.2 常用的机器人智能电路控制器系统
常用的控制器的类别从结构上来看主要有:以单片机为核心的机器人控制系统、基于IPC+运动控制器的机器人控制系统、以PLC为主心骨的机器人控制系统。其中,以单片机为核心的机器人控制系统就是以嵌入的方式将单片机(MCU)与运动控制器结合,使之能独立运行,为了方便与其他设备连接通讯,它必须带有通用接口。由于单片机同时具备中央处理器、动态储存器、只读储存器和输入输出接口,因此应用单片机设计的运动控制器具有电路原理简洁、成本低且运动性能良好的优点。第二种是基于IPC+运动控制器的机器人控制系统,这是当前机器人系统运用的主流,并且将会一直发展下去,它的成本低,兼容性强,计算功能更胜一筹,可以为计算机和嵌入式实时系统的动态控制算法和复杂的轨迹规划提供硬件支持。第三种是以PLC为主心骨的机器人控制系统,PLC是用于自动化实时控制的数位逻辑控制器,学名可编程逻辑控制器,由于自动化符合工业控制的要求而被广泛运用。以PLC为核心的机器人控制系统已经积累了相当多的经验,在技术上已经成熟,可靠性很强,且具有体积小,方便编程和安装的优势。但是它的不足和以单片机为核心的机器人控制系统一样,当需要处理的数据很复杂时不能胜任,高频运作时不稳定,不能满足机器人控制系统的很多复杂的运作轨迹。
在本文中所运用到的控制器就是上述所介绍的第一种:以单片机为核心的机器人控制系统。
1.3 基于嵌入式农业采摘机器人的硬件控制器系统
本文的硬件控制器系统的研究思路主要是由单片机控制主板,通信模块,灰度传感器巡线模块,通信模块,驱动模块等部分组成。
其中起主要作用的是单片机主控板,它控制着整个系统的运行;果树采摘机器人外围环境信息的采集起主要作用的是数据采集及图像采集系统,它们构成了机器人的输入模块;同时伺服电机、末端执行器等部分组成了输出模块。交流伺服控制系统由驱动模块与采摘控制模块组成,本文将其分为两个方面来介绍。
1.3.1采摘机器人的硬件控制器图像采集模块
农业采摘机器人的输入模块主要由数据采集卡以及传感器信号采集和转换模块还有各类信号传感器组成。
视觉传感器是机器人获得工作目标、周围环境和机器人自身定位的基本技术手段。与工业机器人相比,机器人的工作目标和工作环境相当的复杂,需要更先进的计算机视觉传感系统来匹配它们。机器人的视觉传感器任务主要包括:
(1)确定机器人与农作物之间的距离或末端执行器和目标作物之间的相对距离;
(2)确定果实的品质、形状和尺寸;
(3)机器人行走运动的视觉导航。
该机器视觉系统搭配先进的视觉传感器FZ3,是欧姆龙公司独立开发的高新科技产品,可达到千万分辨率的RGB图像处理,比过去传统的单色处理的识别能力提高了数万倍,从而能更准确地识别目标农作物的成熟度。本文研究的智能采摘机器人采用该视觉传感器技术,大大地提高了对目标果实的正确判断率。
图2.3欧姆龙FZ3套装
彩色识别处理器是一种利用视觉机器技术采集水果图像,通过Lab颜色模型判断果实成熟度的采摘机器人的一大重要部件,并通过图像分割方法测量出口标果实的空间直角坐标,最后通过正常成熟果实的颜色特征对所需测量的口标物体进行分割分析,根据BP网络神经型迭代学习算法与果实与口标物的色彩差异性求出各个模型之间的转化公式。
(1) RGB转化为LAB较为复杂,为实现采摘机器人控制系统成功将口标果实分割出来,计算公式为: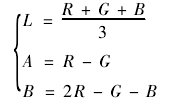
将LAB颜色模型转化为三维空间坐标系的空间位置的计算公式为:(2)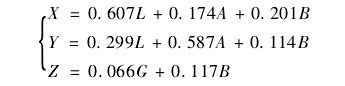
采摘机器人进行图像采集是为了对视觉传感器获取的信息进行处理,其可以根据颜色空间和颜色特征对图像信息实现有效分割,增加视觉系统的时效性。本文主要针对口标果实进行研究,先利用视觉传感器采集果树上的果实图像,图像处理系统可以根据此时的静态图像信息判别成熟度和定位,然后根据颜色特征对图像进行有效分割,使口标果实和图像背景完全分割出来,以便更好地确定果实与树干之间的相对位置,从而判断出口标果实的空间坐标位置。果实采摘机器人的图像采集流程图,如图2-4所示。
总的来说输入模块的组成很多,主体是数据以及图像采集系统构成,其中包括视觉传感器,颜色识别收集器以及颜色识别处理器。这为机器人的自主作业提供了基本技术支持,像是机器人的“眼睛”。
1.3.2采摘机器人硬件控制器的中控主板
采摘机器人的中控主板是最重要的,可谓是机器人的“心脏”,本文采摘机器人的主控板选择了ARM9系列主板,是一种新型嵌入式主机。类型gt6801型嵌入式工控主板,使用深圳恒天智信公司标准的核心处理模块的核心部分,核心模块采用S3C2416处理器,该处理器是三星公司推出的一个成熟的低成本、高性能的处理器,为ARM926EJ内核,主频400MHz的传输行为。支持DDR2内存,集成TFT控制器和2D图形加速器。
GT6801工控主板,在原有工艺,具有4串口再多串口扩展的基础上,板子上共有6个RS232串口、需要多个串口应用程序非常适合。同时,扩展CAN总线接口,满足工业CAN总线通信的要求。提供多种端口、网络接口、声卡、USB、SD卡、GPIO、RS232等接口都被集成在主板上,以满足大多数工业应用的用户需求。提供VGA视频接口,可以支持大尺寸液晶显示器的应用。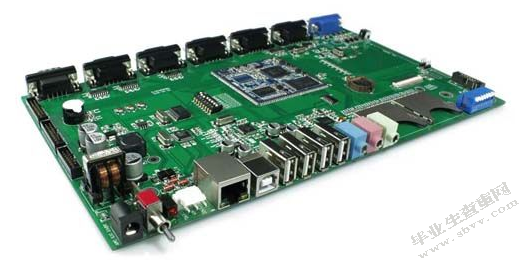
图2.6 GT6801工控主板
农业采摘机器人工作环境采集,通过图像采集系统的采集数据采集卡,利用串行通信方式将控制信号传输到交流伺服驱动器,由机器人电机驱动伺服放大器达到机器的每个关节。同时,通过串行通信模块实时接收机器人控制过程中的反馈信号,反馈值存储在数据中。然后将数据提供给每个控制算法模块,该控制算法模块被处理以生成通过该控制器输出的控制命令,从而形成闭环控制系统。
它主要实现的功能有:
(1)、正、反运动学控制和计算算法的实现;
(2)、与交流伺服驱动器进行通讯;
(3)、各联合编码器的反馈信息和状态监测信号的显示;
(4)、传感器信息的获取与处理;
(5)、图像处理及显示。
1.3.3采摘机器人硬件控制器通信模块
本系统采用的无线通信模块是RB-230,是哈尔滨奥松机器人科技有限公司2012年最新推出的高稳定性,低功耗,使用一个透明的无线数据收发模块GFSK调制的,具有极高的性价比。在任何协议和数据都没有被更改的情况下,就完成了无线数据传输的功能。与一般模块相比,该模块具有体积小、灵敏度高、传输距离长、通信速率高、自动完成通信协议转换和数据收发控制等特点。用户可以通过配置上位机软件,根据自己的需要配置模块的串口速率、工作信道、发送功率、通信速率等参数。本实用新型可直接与微处理器或其它逻辑电路连接,适用于各种开发板与控制器。
图2.7无线通信模块RB-230
有了无线通信模块农民就可以做到无线观测到采摘机器人的工作进度,工作状态,以便于及时的调整和规划采摘路线和进度。
1.3.4采摘机器人硬件控制器灰度传感器巡线模块
采摘机器人在作业过程中常常会碰到果林中固定的障碍物或者穿插在果林中的工作人员,此时就需要采摘机器人有自主避开障碍物的功能。因此,建立良
好的避障系统对减少采摘机器人可能因碰撞带来的损坏有很大的必要性。为了提前对避障路径进行规划,采摘机器人需要通过灰度传感器来获知障碍物的大小、距离等详细信息。
灰度传感器具有灰度检测的8个组成部分,可用于检测待测物体的灰度值。只有待测物体与背景环境有一定色差才能有效识别,色差越大,识别效果越好。与普通红外传感器相比,具有较强的抗干扰能力,通过障碍物的最佳路径可以提前被发现。
图2.8灰度传感器
1.3.5采摘机器人硬件控制器驱动模块与采摘的控制模块
驱动模块和采摘控制模块可统称为交流伺服控制系统。交流伺服系统是由交流伺服驱动器、交流伺服电机和光电编码器组成的闭环控制系统。由于此类电机的惯性矩较大,因此适合机械手这种负载惯性矩发生变动的场合[7]。为了提高操作的安全性,在电机中还装有电磁制动器。伺服驱动器采用asd-ab系列是与运动相匹配的伺服驱动器。此类伺服驱动器主要有位置控制、速度控制、转矩控制三种控制模式[8]。
图2.9 台达ASDA-AB交流伺服系统
本章根据水果采摘过程的要求,设计了基于嵌入式系统的采摘机器人智能控制系统。该系统采用高新视觉传感器,利用图像处理技术,结合嵌人式智能控制系统,果实的成功采摘率和正确识别率都比较高,达到了研究设计要求。研究结果表明该采摘机器人具有实时测量并避障的功能,为未来智能采摘果实创造了条件。
1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:写文章小能手,如若转载,请注明出处:https://www.447766.cn/chachong/595.html,