第1章绪论
1.1论文研究的背景和意义
21世纪以来,人工成本逐步提高。“机器换人”已然变成势不可挡的趋势。其中“物料智能识别”的应用,以卓越的性能,让社会和公司节省了大量的人力成本,提高了生产效率,受到企业的瞩目和期待。“物料智能识别”是基于机器视觉和工业机器人,这两者的价格都昂贵。最近一套“物料智能识别”的总价格最少在几十万元以上。因为众多企业钱财少、效率和收益很低,虽然有“机器换人”的想法,但是“物料智能识别”的价钱对于众多中小型企业来说,是不可能承担的。因为要解决这类问题,工程师们开发“低成本物料智能识别”。在物料不繁重的状况下,采取众多减少基本花销方法,很大程度上减少总系统价格。使那些中型或小型公司或者收益低的公司实行“机器换人”,给予更加开阔的市场空间。“低成本物料智能识别”,很多方面很大程度上是可以替换机器视觉,“低成本物料智能识别”是根据价格少的单片机和光电检测模块,价格大概在100元。它在传送带运行流程中,检查各工业用件物料和角度。机械手技术是高科技技术在现在进步极大,很多使用在每行每业,Intelligent manipulator技术是机械化,自动化生产过程中发展起来的一种新型装置。本设计采用的是电气控制,智能码垛机械手根据PLC(Programmable logic controller,简称PLC)的控制系统设计。
1.2工作原理
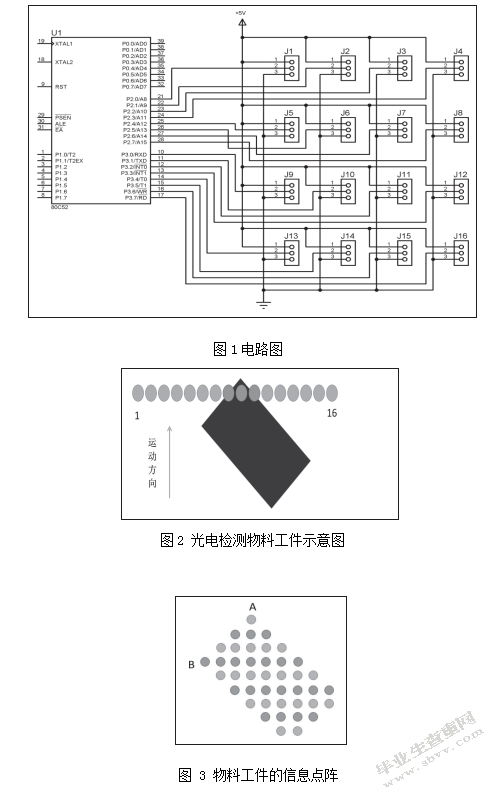
硬件电路非常容易,基于众多光电检测版块装置一排,在流水线上将硬件电路稳定住。让光电转换的接口连接到输出端。电路如图1。在物料工件在输送过程中时,当版块从下方通过时,它所对应的版块位置就能接收到相应信号,随之输送到单片机。因为当物料工件通过下方时,单片机频繁收信息,就被画出所检测物料工件的信息点阵。如图2、3所示

第2章系统设计
2.1方案设计思路
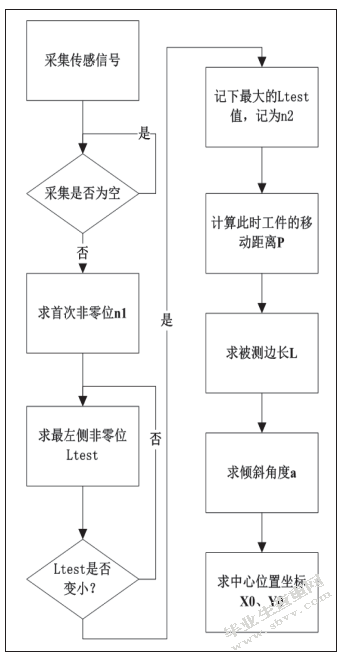
当单片机使用定时方法时,收集光电版块传波感测信息,如16个光电检测模块,它的信号连接成16个数字信息,一个模块与数字信息相互照应。最右边信息是低位,最左边信息是高位。一点信号都没有的相应点是0,很多信号相应点是1。举矩形工作元件为模版,AB长为L1,AD长为L2。如图4所示。当物料工件才经过检测区的时候,它就会知道数据零点位置,第一次非零点A,记为n1。之后,不断的检测这个点在非零点以左,当成Ltest。根据物料工件一点一点的往前走,Ltest数据会一点一点的增加。Ltest取到最大值时,当成n2,这样子就知道B点早就在检测区。假设Q=n2-n1。因为传送带使用步进电机控制,它的V是不变的,因此可以推算出此刻在过程移动位距P。如果L1=,则倾斜角度。如果L1=,则倾斜角度。因为我们由题意得A点的位置所在n1,和知道倾斜角α,物料工件的中心位置(X0,Y0)能用数学公式求得。
2.2系统的程序流程
2.3整体应用
低成本智能分拣流水线主要是由四部分组成:检测系统、码垛机器人、传送系统、控制系统。如图6所示。
图6低成本智能分拣流水线
各个局部目的:
传送系统:让运行的传送带用一定的速度传输所要运行的物料,并且保证系统能够正常的运行。
检测系统:检查测试所要运行工件和物料等信息。
码垛机器人:利用代码将工件物料运行到目的地点。
控制系统:使各部部分的系统无差错的运行。
2.4经济性
(1)使用低成本物料工件识别检测系统
低成本智能分拣流水线运用便宜光电传感系统,取代不便宜机器视觉检测系统,结果这个过程所节约的成本是很多的。因为视觉系统就很昂贵,但是和单片机一起运行的光电检测系统,它的成本仅仅大概100元。
(2)使用改进的低成本四轴码垛机器人
低成本四轴码垛机器人被改造过,使用闭环步进电机,而且它成本仅仅一两千元。
(3)使用低成本嵌入式控制系统
它一定非常控制住本项的所需所求,拥有比较低价的成本,大概100元。
2.5实用性
(1)自动化确定工件物料的位置、角度
低成本智能分拣流水线能够有效检测目标位置、角度。如果稍作改进,即可实现许多规则形状的工件物料识别。
(2)使用工业四轴码垛机器人
四轴码垛机器人不仅成本低廉,而且结构牢固,功能强大,使用灵活,适用于不同的生产工艺。
(3)使用嵌入式控制系统
使用嵌入式控制系统,对包装硬的工件物料的识别、分拣,控制程序,对包装软的工件物料进行准确的认识。
2.5创新性
(1)检查测试系统结构创新
根据精准的传送运行带,对于使用的触发顺序和触发的数字,收集与运算阵列覆盖区域中对于对象所感知的信息,并且断定感知对象有无和它的表率特点。
(2)控制系统结构创新
提升创新效率,降低系统干预。
(3)传送系统创新
它搁置了以前的交流电机,以闭环步进电机为来源,使运动缓慢稳定。
(4)四轴码垛机器人结构创新
全面体系可以无误理解形状工件的方位、立场信息。单纯管用,节约合算。
总结
因为电感元件设计极其繁琐,干脆得到最终的答案是无法的,因此按此流程设计了10kW、20kW的直流微电网滤波电感,经过实际行动体现出计算过程极其容易,计算结果也很符合预期的想法,更加的降低了误差。
参考文献
[1]常喜茂,孔英会,付小宁.C51基础与应用实例M.电子工业出版社,2009.1.
[2]余永权.AIMEL89系列单片机应用技术[M.北京:航空航天大学出版社,2002.4.
[3]江思敏,陈明.Protel电路设计教程[M].北京:清华大学出版社,2008.3.
[4]陆子明,徐长根.单片机设计与应用基础教程[M].北京:国防工业出版社,2005.1.
[5]张文娜,叶湘滨.传感器接口电路的抗干扰技术及其应用D计算机自动测量与控制,2011,9(3).
[6]赵华峰,李龙洲.MCS-51单片机多分支程序的实现[J].渭南师范学院学报,2009.(2).
[7]刘笃仁,韩保君,仓库温湿度的多点移动监测系统设计[D大连民族学院学报,2010.12(3).
[8]张伟,戈振扬.烤烟房温湿度无线数据采集系统[J].计算机工程.2010.36.
[9]胡冠九.我国环境监测技术存在的问题及对策.环境科学与管理.2007,19(4).
[10]贾石峰.传感器原理与传感器技术.北京:机械工业出版社.2008.
[11]张为人,陈军,赵德勇.浅谈环境空气自动监测系统运行过程中的质量保证与质量控制.环境监测管理与技术.2004,06.
[12]杨韬.环境空气自动监测系统信息的开发应用.环境监测管理与技术.1999,01
[13]戢启宏,自动监控技术在环境监测中的应用环境导报2001,03.
致谢
白驹过隙,幸福的大学生活马上要圈上圆满的句号,每天都数着日子在过,因为离校日期已愈发接近了,毕业论文成为我们离校之前学校对我们进行最后一次考试,因此,我以物料智能识别及码垛系统设计为题完成论文。
从编程需求到实验完成,老师、同学和朋友一直在不停的指导我,指导我结束这一次的毕业设计,我向他们表达了最深的感谢与敬意!因为指导老师一丝不苟的精神,所以我在这次的论文中,投入了极大的空前的认真。在规定的期限类,我学会了并且明白了老师所执导的东西。在此过程中,在不断地修改,调整中,我知道只有坚持下去才会成功。我对老师的教学态度有深刻的认知、严格、一丝不苟的工作风格。在我心中建立一个远大的理想,这让我很多事情都能想清楚。这次的毕业设计是一次对我们大学中专业理论知识和实践动手能力的极大的考验,通过这次的毕设让我对单片机的理解更加的深刻,做的过程中也让我明白了遇到困难要多问、勤查、多试,不要遇到难题就放着,放在那里永远也不会永远做不出来,以后遇到了还是不会。本次论文从选题到结束,都是在老师的悉心指导下完成的,老师也付出了很多精神和力气。回首这些天的学习历程,要想真正有所学,有所得,必须持之以恒,踏踏实实的跟着老师的“方针政策”走,不要有排斥心理。进行论文的过程中,并不是布帆无恙,编写中遇到的困难也是比较多的,有时候做不出来就不想继续做下去了,但在老师的讲解和咨询同学的情况下,问题都很轻松的解决了。所以,想再次和尊敬的老师说一声:老师,您辛苦了!
下载提示:
1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:写文章小能手,如若转载,请注明出处:https://www.447766.cn/chachong/12362.html,