1绪论
2方案设计
2.1机器人具备的基本功能
从RoboMasters机甲大师赛大角度来说,机器人得具备以下功能[1]:
1.具备可以移动的底盘
2.具备瞄准和射击17mm和42mm弹丸的云台
3.有机械臂,可以实现抓取功能
4.可以通过变形来适应各种地形
5.具备功率检测,可以实现功率闭环
6.具备17mm与42mm分离机构
7.支持多路PWM输出
8.SD卡槽
9.外接RM陀螺仪接口
2.2机器人各功能实现办法
1.底盘靠4个直流电机来实现,所以开发板上得有4个以上直流电机驱动
2.机械臂可以靠带减速箱的大扭矩步进电机来实现,所以需要3个步进电机驱动
4.变形功能可以通过控制电磁阀来控制气缸来让机器人变形,所以需要多路PWM输出接口
5.功率检测可以通过单片机自带的AD DA接口来实现
6.17mm与42mm弹丸的分离也需要2个直流电机来实现
7.RM开发板为方便用户连接控制舵机等需要PWM控制的执行器,引出16路PWM,分别位于RM开发板的上边和下边。三排排针依次用黑、红和蓝色标志,其中黑色连接GND,红色连接VCC5V OUT,蓝色连接8个通道的PWM信号,为防止烧坏主控芯片,每个PWM信号到管脚之间串联100R电阻,并并联双向芯片ESD到GND。
8.RM开发板为方便用户使用SD卡储存一些调试数据,开发板自带一个SD卡卡槽,用户可以根据具体需求自行选用。
9.RM开发板为满足用户外接陀螺仪的需求,开发板上设有一个CAN接口,用户可以外接CAN接口的陀螺仪模块。
3硬件电路设计
3.1.机械臂控制板
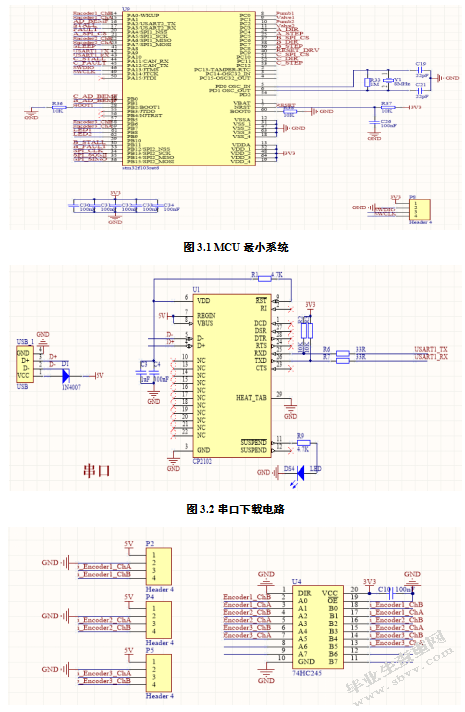
3.1.1stm32f103最小系统(机械臂)
此模块在开发板中主要作用:做一些机械臂底层的驱动和控制,相当于机器人的小脑,上层控制是通过通信实现的,支持的通信方式有串口、I2C、CAN。自带数模模数转化接口,可以实现功率闭环控制。支持多个PWM输出,适合底部控制。支持PWM输入模式,强输出模式,输出比较模式,PWM边缘模式,PWM中心模式[2]。
3.1.2串口下载电路
此模块是用来实现给单片机烧写固件的,也可以用来通信。CP 2102具有高集成度,内置USB2.0全功能空位周期,USB收发器、晶体振荡器、EEPROM和异步串行数据总线(UART),只支持调整权函数信号,不需要任何外部USB原件。CP 2102在工作原理上与其他USBUART开关电路相似.通过驱动Chen序列,将计算机的USB接口虚拟为COM端口,达到了扩展的目的。
3.1.3底盘电机编码器接口
此模块是将编码器的数据实时输入单片机,从而实现底盘电机的闭环控制,从速度环和位置环两个角度可以更好地控制电机。该8位总线收发器是为数据总线之间的异步双通道通信而设计的.控制功能的使用可以使外部时序电路的要求最小化。该电路可根据方向控制(DIR)输入逻辑级,将数据从A总线传输到B总线,或从B总线传输到A总线。启用输入可以用于禁用此电路,使母线[3]-[5]之间能够有效隔离。
3.1.4指示灯
此模块是用来显示系统状态的,不同的亮灯状态代表了开发板的不同状态,可以第一时间排查开发板的故障,并提示操作手如何排查故障和维修。分类帐1和LED 2连接在分类帐1中,通过它们进行自我检查,然后分类帐1和LED 2的状态由分类帐1的状态提示。
3.1.5步进电机驱动
此模块用来驱动步进电机,作为开环电机,步进电机的控制精度也是不错的,为拓展机器人的功能做了进一步的优化和集成。我们使用的驱动器是双通道H桥电机驱动器,DRV 8711,步进电机控制器,使用外部N通道MOSFET驱动双极步进电机或两个刷直流电机。集成了一种微步索引器,以支持整个步骤到1/256步长模式。利用自适应消隐时间和多种不同的电流衰减方式,包括自动混合衰减模式,可以实现非常平滑的运动系统配置。电机停止旋转报告一个可选的反电动势输出。

3.1.6电源电路
该电源可为底盘电机提供电源,也可为开发板提供5V和3.3V的电源。我们使用的芯片是LM 2596。LM 2596包括150 kHz振荡器、1.23V基准电压调节器、热关电路、限流电路、放大器、比较器和内部稳压器电路。防止对设备造成过度电压损坏,电源输入端有双向TVS(SMAJ24CA动作电压26.7V到29.5V)。电源输入端含有防反接电路,当电源正负极接反,该电路不工作[6]。
3.1.7 PCB 2D模型和3D模型
以下是机械手控制板的二维模型和三维模型。上述功能的集成性较好,其功能和稳定性在竞赛中得到了验证。它的体积相对较小,功能更好,比官方开发委员会更便宜。在电子工业中,硬件的稳定性直接影响到产品的质量,而硬件在竞争中的稳定性直接影响到竞争的结果。因此,开发板的稳定性是至关重要的[7]。
3.2.驱动板
3.2.1stm32f103最小系统(驱动板)
此模块在开发板中主要作用:做一些机器人底层的驱动和控制,相当于机器人的小脑,上层控制是通过通信实现的,支持的通信方式有串口、I2C、CAN。自带数模模数转化接口,可以实现功率闭环控制。支持多个PWM输出,适合底部控制。支持PWM输入模式,强输出模式,输出比较模式,PWM边缘模式,PWM中心模式[8]。
3.2.2串口下载电路
该模块用于单片机固件的刻录,也可用于通信。CP 2102具有高集成度,内置USB2.0全速功能控制器、USB收发器、晶体振荡器、EEPROM和异步串行数据总线UART,支持调制解调器的全功能信号,无需外部USB设备。CP 2102在原理上与其他USBUART开关电路相似.通过驱动程序将PC机的USB接口仿真为COM端口,达到了扩展[9]的目的。
3.2.3机械臂步进电机接口
3.2.4底盘电机直流驱动
此驱动可以对电机进行脉冲宽度调制来控制电机转速和转向,支持24V 36V输入,自带隔离防止电机反电动势击穿芯片。BTS 7960是一种大电流半桥式高集成电机驱动芯片,具有P沟道高边缘MOSFET、N沟道低MOSFET和驱动IC.P通道高侧开关节省了电荷泵,从而降低了电磁干扰.集成驱动集成电路具有逻辑电平输入、电流诊断、斜率调节、死区时间产生、过温、过电压、欠压、过电流和短路保护等功能。BTS 7960的典型在态电阻为16mΩ,驱动电流可达43A[10]。
3.2.5夹具气泵驱动
此模块也是对机器人的功能进行了进一步的拓展和集成,可以用于更多类型机器人比赛,也丰富了机器人的功能。气泵驱动主要用来驱动小型气泵吸取一些物体并进行搬用。S8050是一款小功率NPN型硅管,集电极-基极(Vcbo)电压最大可为40V,集电极电流为(Ic)0.5A。S8050是电路硬件设计最常用半导体三极管型号之一。
3.2.6 PCB 2D模型和3D模型
以下是机器人驱动板的2D模型和3D模型,较好的集成了上述的功能,并在比赛中对其功能和稳定性进行了验证。尺寸相对较小,相对于官方开发板功能更齐全且成本更低。在电子行业,硬件的稳定性直接影响着产品的质量,在比赛中硬件的稳定性直接影响着比赛的成绩。所以一个开发板的稳定性是至关重要的。
此机器人是RM步兵机器人,底盘是由4个麦克纳姆轮组成,可以实现全向移动,底盘之上由一个两轴云台,云台之上是17mm发射机构,具有视觉,可以实现自动瞄准射击。该机器人有两种控制方式,可以通过遥控器来控制,也可将遥控器与电脑连接,然后通过鼠标键盘来控制电脑,底盘控制程序是靠一个麦轮的运动矩阵方程来实现。接收机接收到xy值和w(旋转角度)然后传入MCU,通过MCU将其转化为对应电机的PWM值,该值输入到电机驱动中就可以控制电机转动,从而实现底盘的移动。
4无人超市上货机器人
此上货机器人底盘靠麦轮来传动,底盘之上有一个机械臂,机械臂靠4个有减速箱的步进电机来控制,可以实现搬运货物与上货,可以联网进行远程控制,地盘上安有激光雷达,可以实现地图构建,从而进行地图导航。
多功能履带机器人
多功能履带机器人
此履带机器人可以通过一些路面比较复杂的地形,底盘之上有一个两轴云台,可以在上边挂载单反进行移动拍摄,也可挂在机械臂进行一些特定的抓取,而在robomaster比赛中担任过英雄车,可以发射42mm弹丸。可以翻越资源岛的立柱区。
总结
本次毕业设计是关于RM机器人开发板的设计,它是针对机器人比赛设计的,开发板有直流电机的接口,用来做为底盘电机的控制,用几个步进电机的接口,可以做一些步进电机控制,上边的编码器接口是用来做电机的闭环控制,本次的毕业设计不只是对我的技能磨炼,更是对我知识的全面考察。从制作开始到完成制作,我想我已经获得了很多能力。我不不但在理论上有了很大的提升,而且我也对自己的知识技能有了客观的认识。
本文首先说明了整个系统的工作原理和实现方法,给出了系统工作的总体框图。在此基础上,介绍了系统设计中各模块的功能特点,提出了几个解决方案并进行比较,并选择了性能最好的。
总而言之,此毕业设计相对比较成功,达到预期的设计标准。我不但学到了诸多从书本上中无法学到的知识与技能,而且还提高了大脑的思辨能力,丰富了他们对创新和创造力的探索。由于我缺乏很多理论和实践,思想的构架和功能的实现办法都存在很多缺陷。请老师批评和纠正我。
设计结束了,但学习仍在继续。从毕业论文的设计中,我真正认识到,在未来的学习中,我们必须结合理论和实践,运用我们所学到的理论知识来实践。实践是检验真理的唯一标准。这尤其适用于我们的电气专业学习。我们不仅要有丰富的理论知识,还要有较强的动手能力。只有理论和实践才能提高专业水平。这是毕业设计中最大的收获。今后,我们将继续更新和补充我们所学到的知识。
参考文献
[1]强彦,叶文鹏,屈明月,赵涓涓.基于红外避障的智能小车的设计[J].微电子学与计算机,2013,30(02):140-143.
[2]赵津,朱三超.基于Arduino单片机的智能避障小车设计[J].自动化与仪表,2013,28(05):1-4.
[3]林碧琴.基于单片机的智能避障小车的设计和制作[J].电子测试,2013(15):60-62.
[4]顾群,蒲双雷.基于单片机的智能小车避障循迹系统设计[J].数字技术与应用,2012(05):23.
[5]顾志华,戈惠梅,徐晓慧,廉美琳,张金龙.基于多传感器的智能小车避障系统设计[J].南京师范大学学报(工程技术版),2014,14(01):12-17.
[6]张伟,邢玉秀,曹义,张怡.超声波智能避障小车系统设计[J].电子技术与软件工程,2014(01):261.
[7]胡晓芳.基于AVR单片机的智能避障小车设计[J].自动化技术与应用,2014,33(06):95-97+111.
[8]Wan Zhen Zhou,Zhe Li.Design of Intelligent Fire Truck Based on STC80C51[J].Advanced Materials Research,2013,2649(791).
[9]Yu Zhu,Zhe Xin Han,Peng Kun Sun,Tian Hao Wang,Yin Han Gao.Research on the Design of Intelligent Obstacle Avoidance Car Model Based on Ultrasonic Wave[J].Applied Mechanics and Materials,2014,2850(461).
[10]Ming Jiang,Jian Min Zhang.Design of Intelligent Obstacle Avoidance Car Based on FPGA[J].Applied Mechanics and Materials,2014,3365(602).
致谢
时光荏苒,岁月如梭。历时半载的论文即将走向完结。凤凰涅槃需要历经烈火的煎熬和痛苦的考验。从一开始论文选题的迷茫,到写开题报告的彷徨、直至论文初稿的编写并反复修改,最终到最后的定稿,这从中经历了痛苦、聒噪、喜悦等各种各样复杂的心情。然而,在我们一度觉得论文简直就是一项不可能完成的任务时,我们却在不知不觉中就完成了人生中最大的一次成就。
论文这一次经历,不只是一次学术的研究,这彰显着对四年来学习的知识的运用,更多的是一次人生中的一次历练,自己从论文的选题开始就一直亲力亲为,亲身融入在调查研究去,收集资料,累积经验,发现问题并找出解决对策,这都是一种磨炼。让我能在以后的工作学习中不畏艰难,勇于攀登。
我要感谢我的指导老师,从选题,修改,到最后的定稿,都离不开指导老师的悉心教导。在完成论文的过程中,曾经感到过迷茫,不知所措,老师是我前进路上的明灯。正是他的教诲,他的鞭策,让我养成了严谨、踏实的求学态度,这将是一笔受用终身的财富。
感谢我的父母,在我的求学路上一直支持着我,默默地为我奉献,请让我跟你们说一声辛苦了,我的父亲母亲。
最后,感谢我的母校,我的所有老师,舍友以及同学,大学四年终生难忘。
下载提示:
1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:写文章小能手,如若转载,请注明出处:https://www.447766.cn/chachong/12690.html,