摘要
在当前能源短缺的情况下,太阳能作为一种新型的清洁能源,越来越受到人们的关注。当太阳能电池板工作时,由于阳光方向不确定,传统的固定太阳能电池板不能够充分吸收太阳光能量。为了解决这种缺陷,本设计研究了一种基于单片机的太阳能电池板智能跟踪系统。
硬件方面,根据太阳光入射角的变化特点,设计了一套基于四区域光电传感器跟踪方式的双轴跟踪系统。本系统采用STM32F103C8T6单片机为主控制器,forKY-018型光敏电阻传感器设计太阳位置检测电路。收集的光电检测数据传输至主控制器,进而驱动 sg90舵机带动太阳能电池板转动。太阳能电池板产生的电能先存储到yxa 50V 470μf电容中,通过电容电压的逐渐提高,然后在储存到18650锂电池中。
软件方面,提出了四区域光电传感器的布局方式。为了保证系统的跟踪精确度,采取一种采集2个相邻信号求平均值的信号处理方法,并完成了各模块及四区光域光电传感器的程序流程图设计和控制程序的编写及调试。
太阳能电池板产生的电能驱动两个sg90舵机,从而实现各种天气条件下对太阳光的自动跟踪。采用电容器与锂电池与混合储能方案。在试验条件下,可为锂电池提供约0.1A的充电电流,连续充电半小时后,锂电池在原来电压为3.224V上提高了8.47%。
【关键词】太阳能追踪;四区域光电传感器;舵机;可充电锂电池
一、引言
![]()
![]() 课题背景
课题背景
1.1.1 能源危机与环境问题
众所周知,能源在人类的生存和社会的发展中起着十分重要的作用。人类已经充分认识到当前能源来源及其利用方式的可不持续性,这种高度不协调的不具发展性的能源构成将会给社会进步蒙上阴影。世界各国为地球上有限的能源问题上不断产生摩擦。特别是近年来,能源问题日益成文备受关注且极容易引发国别或地区冲突的高敏感议题,随着各种化学能源即便部分国家储量短期内还算充分但从略长期目光来看依然面临着极大困局如石油、煤炭等。从数据来看,当前找到的石油,以现阶段用量规模来看仅能维持40年,而天然气则稍多,能够维持70年,煤炭最多可开采200年左右[1],因此总体来看,各国都不能再忽视这种肉眼可见的资源枯竭趋向,获得能够有效替代的且具有可持续性的新能源形态已经成为XX重要议程。
传统能源的肆意滥用显然已经成为一个世界性难题,对人类未来蒙上阴影,现在地球平均一天都会释放大量温室气体,近些年这一数据已经达到1亿吨,因此具有严重气候隐患,如果不对此采取果断措施,会加速两极冰盖融化,进而严重破坏并压缩人类活动空间。显然,当前人类社会持续发展诉求与环境间的平衡已经被破坏并出现了尖锐矛盾。如何高效利用能源,保护地球环境已经成为一个全球性的重要问题。首先,世界各国都应该遵循可持续发展的理念,不应该走先污染后治理的老路,这样会严重破坏社会与环境的和谐发展;其次,各国都需要依据本国地理条件与国情状态去发展各自新能源相关技术与生产,如太阳能、水能等,其中对很多国家来说,太阳能几乎是无差别的,不像水能等需要国土内有河流条件,因此太阳能光伏事业得到更大重视,国内同样如此,光伏产业风水水起,在国家大力扶持下还处在风口期,中国地区处于低纬度,阳光资源颇为丰富。如果能够让太阳能利用更具效率与效能,无疑对国内能源结构具有较大价值,并为后代发展保留更大空间获得可持续性。
1.1.2 利用太阳能的优势
为了让不可再生化学能源能够利用更长时间,且迫于沉重的环境压力,人类开始认识到发展不能没有后代观,要始终关注人类长期生存利益,这就使得清洁能源开发成为全球热议话题。如果是上个世纪人类技术还停留在化学能源为主阶段,那么新世纪必然会是一个环保与高效的新能源开发及大规模改变能源结构的时代。各种新能源形态与模式如光能、风能等都将发挥更大作用。
中国地区处于北半球,太阳能资源丰富。因此我国的太阳能光伏发电行业发展前景十分广阔。国内光伏发电事业亟需加大投资以此提高其发展速度,实现在较短时间内能源结构达到满意比例,从而让可持续发展能够在能源层面上得到实现。而在所有能源中,太阳能具有如下优势:
(1)存在的普适性:虽然太阳光照存在着维纬度方面的差异但是其覆盖面依旧不是其他能源方式可比,其辐射范围十分广,这对太阳能的开发利用是一个巨大的优势。
(2)利用的清洁性:与传统能源形态比,其具有可再生且无次生污染的特性,其开发与利用都会造成残留与污染,这因此与当前绿色发展导向高度适配。
(3)储量的巨大性:具有巨大储能,一旦人类能够将对其的利用率提高的一定水平,将有望成为支撑性能源来源。
(4)应用的长期性:由宇宙时间尺度来看,太阳能核能能够利用数百亿年,相比较人类区区历史,显然其已经近乎无限,因此太阳能完全可以视作可再生且长期性能源来源。
国内外太阳能跟踪的研究现状
国外对太阳能电池板跟踪系统研究一直十分重视。1994年,捷克科学院物理研究所研发出一种单轴被动太阳光追踪器,采用形状记忆合金调节器收集阳光温度的变化[2];X科学家布莱克于1997年研制出了单轴跟踪器,跟踪装置采用太阳在赤道坐标系下的工作原理,完成太阳横方向自动跟踪,纵方向还需手动调整,不能够较精准的进行跟踪,接收热量效率提高15%[3];1998年,X加州大学成功研发出ATM双轴太阳能跟踪设备,增强太阳能板能量转化率[4];2002年2月,亚利桑那大学推出了一种新的太阳能电池板跟踪系统。采用电机跟踪,铝型材料框架,有重量轻、结构紧凑等突出优点[5];2006年2月,西班牙太阳能公司Acciona建造了西班牙最大的太阳能发电厂,整个设施由14400个太阳能电池板和400个太阳能跟踪托盘组成。这些托盘一年中每天都沿着太阳从东到西的轨迹运行,高度角固定在45°的斜坡上,在纵方向并没有实行追踪。此设备收集太阳辐射,比固定平面系统可增加35%的能量输出[6];日本大成建筑公司研发了一种新的室内采光产品,称为T-Soleil。T-Soleil由自动阳光跟踪反射器和多个反射器组成。阳光自动跟踪反射器安装在屋顶上,由一个小电机驱动,可以随着阳光的运动同步旋转。阳光通过多个反射器反射,使高层建筑内部与室外一样明亮,有效节约能耗[7]。
国内对太阳能发电技术的研究起步较晚。近年来,开始许多专家和学生对其进行深入研究。中国科学院工程热物理研究所王志峰研发了一种单轴跟踪太阳聚集系统[8] ;张晓霞等人研发了蝴蝶式集中光伏发电自动跟踪装置,采用视日轨迹算法,以AT89C51单片机为主控制器,实现了双轴主动追踪,控制精度为0.1°[9];东南大学的朱凯开和周世悦研发了一套极轴式太阳能电池板跟踪系统,太阳能电池板的极轴与地轴平行,极轴的安装角为当地纬度角。电池极与极轴之间的安装角为太阳赤纬角。由于太阳赤纬角每天都在变化,大约0.4°左右,电池板安装的仰角和倾角需要定期调整。采用PLC作为主控制器,跟踪机械结构相对简单,但需要人工维护调整[10];海河大学卞新高、杨缝缝等人提出了一种聚光太阳能发电系统的大规模太阳光线自动跟踪方法。该方法采用太阳视轨迹算法对太阳光线进行粗略定位,当跟踪系统运行到一定的精度范围内,精细定位光跟踪传感器进行精细定位调整。采用DSP作为主控制器,系统的理论跟踪精度可达1.48°,其设备较为复杂[11]。
论文课题的意义和主要研究内容
1.3.1本课题的研究意义
相关研究表明,采用太阳能电池板智能跟踪系统相比于固定太阳能电池板可以有效提高太阳能的利用效率,加强对太阳能电池板智能跟踪系统的研究对未来大规模太阳能光伏发电和太阳能工程建设具有重大的意义。本文在研究现有光跟踪理论的基础上,设计了一种以单片机为核心控制芯片的全天候实时跟踪太阳系统。下面用香港大学的KPCheng和SCMHui两位教授的研究成果来分析太阳跟踪的理论意义。图1-1中为香港大学两位教授比较固定太阳能板接收装置与太阳光追踪装置的情况下的能量获取情况。
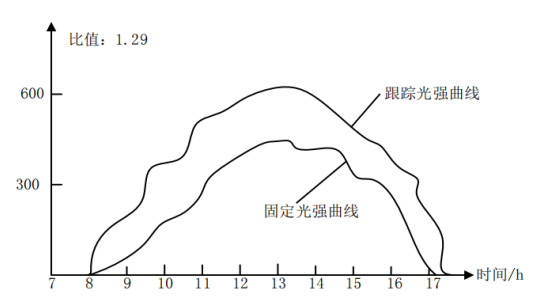

图1-1 固定太阳光接收和追踪太阳光装置所吸收能量对比图
从图1中可以看出,固定太阳能板接收装置和太阳光追踪装置,对能量的接收效率有明显的差距,研究表明,固定太阳能板接收装置和太阳能板追踪装置其能量的接收率相差大约37.1%。[12-13]因此,提高太阳能利用率并实现对阳光方向来源的实时跟踪就具有重要价值。
1.3.2本课题研究内容
本文方案所涉及的系统能够一定幅度增强太阳能利用率,以STM32单片机作为控制系统而构建成功的具有较高性能及技术含量的太阳能电池板智能跟踪系统,其工作逻辑就是对一天中太阳光方向会持续变化这一现象,进行实时且智能化跟踪监测,以获得最大阳光利用效率。因此,本文研究包含下述几点。
系统总体设计。确定方案总体结构框架与细节思路,明确需要提供或满足的各项技术指标,包括综合效率更好的跟踪方式与具有更高操作性且实用的储能方法。并搭建方案总体框架。硬件设计。涉及两部分内容,其一是硬件电路设计,其二是方案所涉及主要器件配件选择。这一设计内容要满足两个目标,一方面实现太阳能板能够灵活跟踪当前阳光角度与方向变化,其二实现将电能储存到18650锂电池中。 软件设计。需要完成三部分系统程序编写及调试工作,包括了光电检测、数据采集与主控等,考虑适用性原则决定采用C语言实现这项工作。系统测试。系统总体设计完成后,主要是进行实物检测并基于所得到的实际数据来判断本系统能够满足预期目标与任务要求。
二、系统总体设计
系统框图见图2-1。构成包括了单片机最小系统、四区域光电传感器、太阳能电池板、YXA 50V 470μf电容、18650锂电池,sg90舵机等几部分组成。
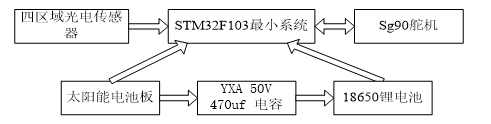
图2-1 系统的总体框图
2.1太阳能能量收集模块
太阳能收集模块的主要构成就是电池板,采用规格为5V、220mA、117mm×68mm的太阳能电池板吸收光能后,利用光电效应原理能够实现光能电能间的转化并收集,另外由于单块太阳能板无法达到需要的电流标准,因此在方案中采用2块板并联,从而让充电达到预期的效果。
2.2电池充电储能模块
本文方案中储能模块采用的是当前主流的锂电池,并且考虑实用性,确定为18650锂电池,并且由于太阳光并不能长时间保持稳定光电,也导致太阳能板生成的电流电压也同样会出现较大起伏变化,无法稳定充电,需要先利用电容现进行电力存储,方案中利用的是YXA 50V 470μf电容,当电容的电压逐渐提高到一定值,再充入锂电池。太阳能电池板的正极与YXA 50V 470μf电容正极相连,YXA 50V 470μf电容正极与18650锂电池的正极相连,太阳能电池板的负极、YXA 50V 470μf电容负极和18650锂电池的负极连接在一起。只有当电容与电池电压间,是前者高于后者,此时充电才能进行,否则不能。
2.3防反充模块
防反冲模块设计中,电路方案中利用到了肖特基二极管,这是考虑到其具有低损耗且占用空间小等特点,在太阳能电池板的正极与YXA 50V 470μf电容的正极的之间、YXA 50V 470μf电容的正极与锂电池正极之间,分别与二极管连接,构成电路环境,防止18650锂电池给YXA 50V 470μf电容进行反充。
总之,本系统设计方案设计了对软硬件两方面的开发与方案供给,其中硬件电路最值得关注的就是控制器的选择,方案中利用的是STM32F103C8T6单片机,此外还涉及到其他重要组件设计,如舵机、光感器等,软件方案部分,设计平台选择为Keil MDK5,并将完成的控制程序下载到单品季中。此外对单片机方案还需要进行最小系统的开发,一般会包括供电与输出电路、下载电路、晶振电路等[14]。
三、硬件设计
本文方案中控制中枢是利用的单片机最小系统为控制核心,涉及模块的主要功能方向包括单片机控制电路、舵机驱动电路、电源电路、光电传感电路等。方案中系统框架如图3-1。
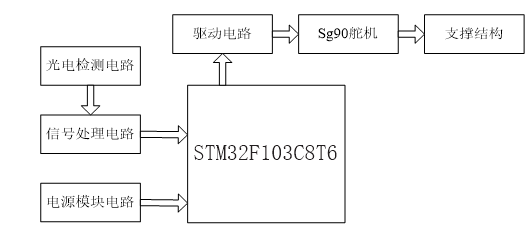
图3-1 硬件总体框图
3.1单片机控制系统
本文方案中对于主控系统的选择,综合考虑了性能与适用两个因素确定为STM32F103C8T6,其是一种当前主流较为认可的32位微处理器,从资料来看,其内核规则与型号选用的是ARMCortex-M,能够在低电压状态下正常运行,只要3.3V电压即可实现,工作可承受温度范围达到工业级,最低为-40℃,最高能达到85℃,工作频率测算所得最高值为72MHZ,内存容量64KB,其设计特点为控制简易且提供丰富可扩展性,经济性突出但能够应对较复杂问题,低功耗等等[15]。
3.2光电检测电路
3.2.1光电传感器布局
本次设计方案的核心问题就是如何定位到当前太阳能光强最显著的方位,在解决方案中本文设计了针对性的追踪模块,其主要特色就是布局方式,为达到最大感应范围而采用四区域光电传感器,具体分布位置见图3-2,其中详细列出的①、②、③、④点都是预先设计好的追踪模块安装位,会分别在这些地方置入 forKY-018 型光电传感器,从结构来看,形似十字交叉的隔板,且其规格大小是严格按照电路板尺寸及实际具备的光敏面积等进行设计,使得传感器能够基于当前太阳实际照射方向进行光线接收角度的调整。其中两个遮光板在其中主要功能是切割受光区域。
当阳光普照时,由于遮阳板会遮挡阳光,因此这四个放置点的光敏电阻接收光线强度存在较大差异,使得输出电流或电压也各自具有不同数据。微处理器会据此运行调整程序,发出信号到转向机构,让其实现方向调整,从而让这四个放置点的光敏电阻能够输出同样标准的电流或电压。且太阳能电池板具有追光的要求,而这需要其能够垂直对准太阳光来源方向,其设计见图3-2。总体来说,这种光电传感器布局方式实用性非常突出,完全匹配太阳光照射变化,对其东西向与南北向的运动变化都纳入了设计要素,让传感器检测范围达到了最优化,并增强环境适应性,同时该布局方式也简化了电路设计。
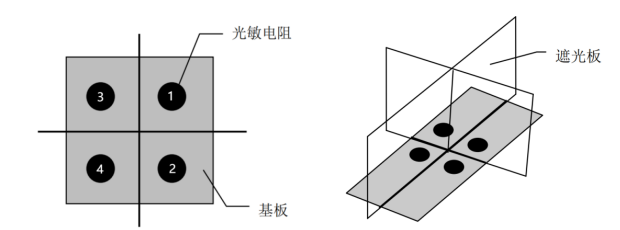
图3-2 四象限光敏电阻分布图
3.2.2四象限光敏电阻探测器
前文已经提到,光电检测部分出于环境适用性的考量而确定利用forKY-018 型光敏电阻传感器,并且数量为4个,在安装位置上,以电池板平行平面作为放置点,将这一区域划分为4个象限,具体可见图3-2,每个象限分别放置一个光敏传感器,且依据数字顺序将传感器的AO引脚分别与控制器的对应引脚相连,也即是①号位置传感器AO引脚与控制器A1引脚连接,以此类推,具体见图3-3,每两个光敏传感器会构成一个感知组。由于光电效应,当太阳能电池板接收到太阳光,此时上面放置的光敏电阻也会准确感知并给出具体的值,具体是通过将其内部的光信号接收器实现信号转换,又将这个信号输送到单片机,其中A/D模块将获取到4个通道的值,并采取相邻光敏电阻取均值之后将一对均值进行比较,如可以是①②和③④这样的划分模式进行比较等,当两个数值并不一致,且彼此将差值较大,已经高于原来设定的舵机灵敏度时,此时会进行舵机转动,直到太阳能板能够与太阳光间接受角度已经变成了垂直,并且所有电阻采集到同样的光强信号,彼此间不再检测到电压差,单片机才会停止进行舵机调整。
3.3舵机驱动电路
所谓舵机,就是一种伺服电机,其功能就是依据信号脉冲时长来获取最终需要实现的旋转角度。舵机的控制信号PWM,给舵机提供一定的脉宽,它的输出轴就会保持在一个与之对应的角度上,直到下一个不同的脉宽出现,转到新的对应角度。当舵机接收来自信号线的控制信号,在实际工作时,舵机转动,会让其内部配件反馈电位计保持同样转动角度,其将当前转动情况进行信号输出,并与控制板控制信号进行比对,从而根据信号间差值不断进行转速与转向的调整,这一操作过程需要等两个信号相同才会终止。因此本文所利用的驱动舵机也依据转向的不同进行了划分,也就是水平和垂直两个方向。舵机是由电信号的脉冲持续时间决定的旋转角度的一种伺服电机。这两个不同控制方向舵机,其PWM控制线也会与不同单片机端口连接,其中水平舵机与PB7口,而垂直舵机则是与PB6口。具体可见图3-4。实际控制流程为当主控器接收到光前信号,将提供PWM调速流程,其中控制信号从PWM传导电路板,电机启动并将传动到输出舵盘。随后舵盘转动又会被电位计采集到的信号并反馈到电路板,并进行比对反馈,根据差值得到特定转向与转速,并据此驱动电路并实现舵机转动,直到两个信号差值已经满足灵敏度条件才终止。
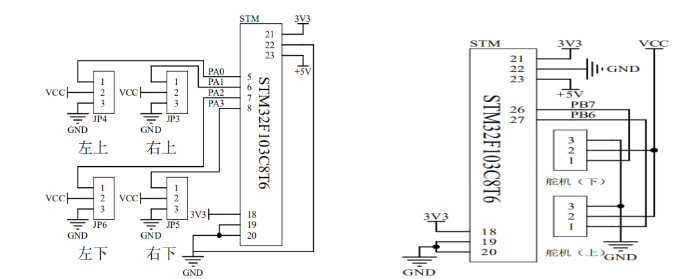
图3-3 光敏传感器电路图 图3-4 舵机驱动电路图
3.4电源模块电路
本系统中舵机型号是sg90,需要将这个型号性能纳入考虑范围,包括充电率、承载力等,本文系统中将采用太阳能板并联这种供电模式,因此并非直接进行放电,而是需要把电输送到电容,当电容的电压逐渐提高到一定值,再向锂电池放电,从而能够有效防止因为电压差出现反充的情况。为了实现这一充电形式,在太阳能板与电容、电容与锂电池之间进行了电路设计并组合,前者间加入了二极管D1,从而构成一个闭合回路;后者加入二极管D2,投诚一个回路。电容电压与锂电池间电压形成一个0.5V差值,而太阳能板与锂电池之间也同样存在一个电压差值且同样是0.5V。这一结构具体可见图3-5。
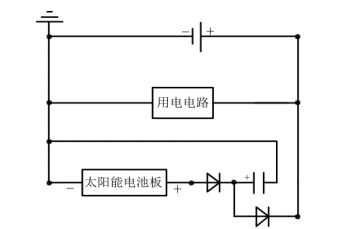
图3-5 电源模块电路
四、软件描述
本文系统开发平台考虑适用性选择而确定为Keil MDK5,并且利用到了C语言。其中主程序开发流程图已经进行了详细描绘并列于图4-1、系统上电后,先会进行模块初始化,此时光强信号也会被光敏电阻采集到的相应光信号,并在内部实现了信号转换,之后将处理后的信号输送到系统核心部件单片机。A/D口分别接收到4个信号源数据,并将它们进行两两划分,一组为水平向,一组为垂直向,获得两个组进行电压均值计算,判断这两个均值的电压差是否满足光电传感器预先设定的灵敏度条件,若不满足,则会控制对应方向的舵机进行转动,直到满足灵敏度要求,此时太阳能板将保持与光线之间是一种垂直状态。[16]
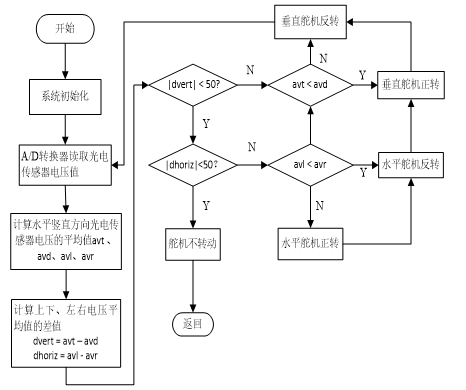
图4-1 主程序算法流程图
五.实验结果及分析
根据上文提供的详细设计方案内容与细节描述,并据此制作太阳能自动追光模型,并对该模型的充电性能进行反复验证并获得相应的结果,具体数据可见图5-1,可以看到其中锂电池存在着一个初始电压值,数据显示是3.8v,此时需要对其进行放电,这是为了能够让充电顺利完成,电压保持低于3.5V,并进行具体太阳能板充电测试,此时测试场条件为,有阳光,且温度条件是19℃,湿度条件为38%,测试内容有五项内容,首先是光强数据获取,其次是电路四个节点数据获取,这里包括太阳能板电压当前具体数值、电容正极电压当前具体数值、锂电池正压当前具体数值。充电电流等,5min为一个采集周期,并持续测试到7组数据,测试项数据可见图9。
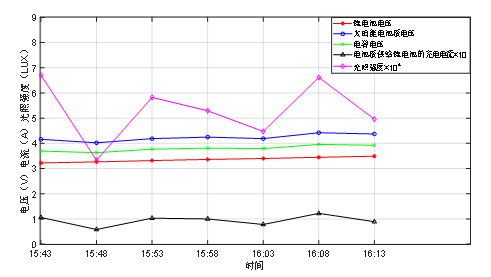
图5-1 实测数据图
光强条件最好时,太阳能板能获得最大电压,由于前文已经提到,其与锂电池间存在着0.5V电压差,且是正差状态时,满足二极管正向导通压降,之后会进行充电,从数据来看,充电35分钟,锂电池电压从原来测量数据3.224V,得到稳定提升,之后测量数据为3.191V,在光照强度为5000LUX左右、太阳能电池板电压为4.3V左右和稳定的0.1A左右的充电电流下18650锂电池电压上升了0.273V,锂电池在原来电压为3.224V上提高了8.47%,实现了18650锂电池能量补充。
六、结论
6.1结论
本文在研究国内外现有太阳能智能跟踪技术的基础上,查阅了大量的国内外文献,设计了基于STM32的太阳能电池板智能跟踪控制系统。且系统中利用了光电编码检测电路,从而提供了舵机闭环调整机制,信号电压为0时,处于静止状态,不进行自转,同时转矩增加,也会让转速保持着同比例的均匀降幅,从而降低能耗。同时对18650锂电池的能量进行有效补充。该系统具有机械结构简单、运行可靠、设计合理、成本低等特点。无需手动调整操作姿态,即可实现太阳轨迹全天候自动跟踪。本文的研究工作和成果总结如下:
(1)在研究分析国内外太阳能应用领域和太阳跟踪技术发展的基础上,设计了一种基于四区域光电传感器跟踪方式的双轴跟踪系统,使控制系统能够全天自动跟踪太阳。该策略采用间歇性跟踪,避免了系统频繁位姿调整造成的功耗损失;设置四区域光电传感器跟踪精度阈值,避免系统振荡。
(2)本着更智能、更可靠、更灵活的设计方针,采用ARM嵌入式芯片stm32f103c8t6作为系统的主控制器,搭建系统硬件结构,并在 Keil MDK5集成开发环境下进行应用程序的开发,用C语言编写。系统功能正常,运行稳定可靠,能准确跟踪太阳轨迹。
虽然本文对太阳能自动跟踪控制系统所涉及的大部分内容进行了深入的研究,并取得了一定的成果,但由于时间、测试条件和自身能力的限制,本系统还存在一些不足和需要改进的地方:
(1)本文的四区域光电检测部分没有考虑天气状况不好的情况,因此有必要进一步研究天气状况不好对光电检测精度的影响。
(2)受实验场地气象数据和环境条件的限制,光强检测试验不够充分,需要进一步完善。
(3)实现远程控制。太阳自动跟踪控制装置大多安装在电力传输不便的地区或沙漠无人地带。如果可以实现远程控制,会更加人性化、智能化。
6.2展望
太阳能作为可再生能源形态,对我国社会的长期发展有着重要意义,相信太阳能电池板智能跟踪设备在不久的将来将充分应用于户外工作领域。其工作环境的可预测性和可控性都比较差,所以需要采取一定的措施。比果刮风太大,会对太阳能电池板智能跟踪设备造成一定的损坏,所以需要安装风力检测装置。当风力较大时,风力检测的中断优先于面板调整,以避免风吹到面板上,使面板承受较大的风。此外,在大型太阳能光伏发电系统中可以添加上位机监控系统,不仅可以实时了解每个面板的工作动态,而且在遇到冰雹等恶劣环境时,上位机可以控制面板,使太阳能电池板板直立在地面上,降低损坏程度。这样,整个太阳能光伏发电系统可以更有效的长时间工作。在未来大规模太阳能光伏发电系统的不断普及中,可以大大减少人工劳动力,同时也提高了系统的智能化水平,使太阳能光伏发电系统的使用价值更高。
能源一直是人类社会进步和发展的支柱,在当前能源储量有限、消耗巨大的情况下,太阳能取之不尽、用之不竭、无污染等特点,自然成为人类首要大力发展的可再生能源。由于现在太阳能光伏发电系统趋于成熟,并且具有使用简单方便等特点,可以担起新一代能源的重任。我们相信,当化石能源退出能源的主导地位时,太阳能光伏发电将展示出巨大的能力。从近几年可以看出,太阳能光伏发电量逐年大幅度提高,太阳能电池板智能跟踪设备越来越智能化,从而减少了大量的人力工作量。随着光电转换效率的不断提高,太阳能光伏发电将不断深入人们的日常生活,并将成为一种主要的能源。
参考文献
余海.太阳能利用综述及提高其利用率的途径[J].新能源研究与利用,2004,79(3):8-9.[2]M.J.Clifford, D.Eastwood. Design of a novel passive solar tracker[J]. Solar Energ, 2004,77(3): 269-280.
[3] E.Lorenzo, M.Perez, A.Ezpelata, etal. Design of tracking photovoltaic systems with a single vertical axis[J]. Prog Photovolt, 2002, 10: 533-543.
[4]P.Roth, A.Georgiev, H.Boudinov. Design and construction of a system for sun-tracking[J].
Renewable Energy, 2004, 29(3): 393-402.
[5] S.Abdallah, N.Salem. Two axes sun tracking system with PLC control[J]. Energy Convers
Manage, 2004, 45(11-12): 1931-1939.
[6] F.R.Rubio, M.G.Ortega, F.Gordillo, etal. Application of new control strategy for sun tracking[J]. Energy Conversion and Management, 2007, 48(7): 2174-2184.
[7] 尤金正. 基于图像传感器的闭环式太阳跟踪控制器的研究与实现[D]. 苏州:苏州大学硕士学位论文,2010: 5, 40.
[8] 王志峰. 抛物跟踪式太阳高温集热器的研究[J]. 太阳能学报, 2000, 21(1): 69-76.
[9] 张晓霞, 殷盼盼, 张国, 等. 蝶式聚光光伏发电自动跟踪太阳装置的设[J]. 太阳能, 2008(9): 32-34.
[10] 周诗悦, 朱凯, 刘爽. 太阳能电池板自动跟踪系统[J]. 控制工程, 2009, 16(增刊): 17-19.
[11] 卞新高, 杨缝缝, 辛秋霞. 一种大范围太阳光线自动跟踪方法[J]. 太阳能学报, 2010, 31(10): 1298-1303.
[12] Yacov Tsur, Amos Zemei. Long-term perspective on the development of solar energy[J]. Solar Energy, 2000,68:379-392.
[13] 张宝星. 太阳能利用的跟踪与聚焦系统研究[D]. 合肥工业大学, 2006.
[14] 戴寅松,徐长帅,马思宇.基于STM32的太阳能充电系统设计[J].信息技术与信息化,2019(02):43-46.
[15] 韩悦,刘忠富,张可,翟延威,刘胜阳,蔡云轩.基于STM32的多功能太阳能追踪系统[J].山西电子技术,2019(06):52-55.
[16] 武风波,张会可.太阳能自动跟踪系统的设计[J].西北大学学报(自然科学版),2016,46(06):837-840+846.

1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:打字小能手,如若转载,请注明出处:https://www.447766.cn/chachong/66936.html,