摘要:
随着机器人技术得到发展以及机器人应用的增加,移动机械手逐步应用于易燃易爆物品的装配、搬运以及拆卸等任务,适应于高辐射高温等极端环境的工作,以及在类似今天这种特殊的存在危险病毒的时期中,来代替人来进行工作来保护人生命财产安全的工作中发挥着重要的作用。
本课题在国家重大研发计划项目“人机互助型冗余灵巧作业机器人关键技术与应用验证” 2018YFB1305300 项目支持下展开。要求设计能够进行抓取-放置作业,进行初步处理的移动机器人系统。推荐采用移动平台加装机械臂,组成串联式机器人结构,尽量设计为轻型、多自由度机械手臂,并完成对该系统的运动学分析。
关键词: 危险环境移动机械手处置
1 绪论
1.1 课题分析
1.1.1 设计任务
本课题要求设计能够进行抓取-放置作业,进行初步处理的移动机器人系统。推荐采用移动平台加装机械臂,组成串联式机器人结构,尽量设计为轻型、多自由度机械手臂,并完成对该系统的运动学分析。要求每个关节模块留出标准化接口,选取合适的材料,最大限度的减小自重。
1.1.2 设计要求
1. 多自由度机械手臂结构设计,根据设计要达到以下要求:
(1)工作范围 1m;(2)持重 2kg;(3)3-5个自由度,
2. 工作可靠,结构简单,外形美观。
3. 遵循模块化设计要求,要装卸方便,并便于维修、调整;
1.1.3 过程要求
2020 年
2 月 17 日~3 月 1 日 文献检索、外文资料翻译、整理并撰写文献综述
3 月 2 日~3 月 8 日 前期报告撰写、格式审查
3 月 9 日~3 月 22 日 前期报告修改并提交至毕设系统
3 月 23 日~ 4 月 5 日 初步提出设计方案,并进行比较、选定可行方案
4 月 6 日~4 月 19 日 机械结构设计,草图
4 月 20 日~4 月 26 日 中期报告成稿和修改,以及机械结构设计与优化
4 月 27 日~5 月 10 日 机械机构详细设计及绘图,同时开始仿真
5 月 11 日~5 月 17 日 机构运动学分析和检验,编写设计说明书并上传到系统
5 月 18 日~5 月 24 日 整理设计原则、设计方案,设计说明书定稿
5 月 25 日~ 6 月 3 日 整理所有设计资料,提交评议,答辩
6 月 4 日~6 月 10 日 完成所有资料整理提交,完成毕业设计。
1.2 课题研究背景及意义[7]-[13]
从机器人概念的提出到现在已经经历了将近一百年的历史,机器人技术已经反战成为一种极其具有前景的产业,各个国家也越来越重视机器人产业的发展。随着机器人技术的发展,对机器人工作要求逐渐提高,机器人技术逐渐应用于高危险的工作环境中来保护人类的生命财产,也被称为特种机器人[7]。
(1)在军事领域,利用机械手代替人来进行排爆等危险行动,来保护士兵的生命财产[8]。例如Daksh全自动炸弹回收装置机器人可以在路面陡峭崎岖的环境中较为平稳的行走,它的机械手臂可以利用内置的x光扫描对可疑物品扫描探测。如图1-1所示:
图1-1 Daksh军事机器人
(2)在危险环境中,为了保护人类的生命安全,人类必须采取相应的的保护措施来应对危险环境带来的危害,而机器人可以安全的在这些区域进行工作而不需要像人那要采取保护措施。例如1994年,CMU利用Dante机器人探测Alaska spurr火山采集火山气体样本[9]。如图1-2。
图1-2 dante八腿机器人
(3)在太空中,同样存在机器人的身影。由于太空中特殊的环境,到目前为止还没有人类能够前往火星,但是许多太空漫游车已经被送往火星并对火星进行勘测。例如1997年,NASA的探险者登陆火星,并由旅行者将所拍摄的照片发回地球[10]。如图1-3所示:
图1-3 NASA探险者
(4)在水下,机器人也有相应的应用,随着海洋经济的发展和就是的需求,水下机器人的发展也越来越明显。水下机器人可以用来进入深海进行长期的探索[11]。例如,中国自主研发的4500米深海资源自主探测系统潜龙二号水下机器人,也是国内最先进的自主水下机器人[12]。如图1-4所示:
图1-4 潜龙二号水下机器人
(5)高空作业机器人。随着社会的发展,高层建筑如雨后春笋般出现,同样对于高楼的清洗、装修和维护成为高危险的一种工作,因此特种机器人代替高空作业是一种不可逆转的趋势[13]。比如哈工大研制的面壁清洗机器人。如图1-5所示:
图1-5 面壁清洗机器人
随着机器人技术得到发展以及机器人应用的增加,移动机械手逐步应用于易燃易爆物品的装配、搬运以及拆卸等任务,适应于高辐射高温等极端环境的工作,以及在类似今天这种特殊的存在危险病毒的时期中,来代替人来进行工作来保护人生命财产安全的工作中发挥着重要的作用。因此本课题在与当下适应和以后的发展中都存在一定的意义。
1.3 特种机器人发展趋势[14]-[16]
目前特种机器人受到了世界各国的高度重视,相比于一般的机器人系统,特殊机器人需要更高的灵活性、机动性和更强的传感和检测能力。为更好的解决这些问题,特种机器人必将向以下方向发展:
(1)远程监控技术,机械手和操作员之间的协调控制,利用网络增加遥控范围同时利用5G网络最大程度减少网络延时的影响[14]。
(2)基于多传感器信息的采集、融合、理解、处理和控制技术将是实现在未知环境下具有高灵活性和高探测感测能力的特殊机器人的关键[15]。
(3)导航与定位问题:目前历程计,陀螺仪等技术相对成熟,但在水下等特殊地域目前还没有特别好的方法,未知空间的探索的定位问题也是目前正在探索的问题
(4)机器人控制技术:注重开放式、模块化的控制系统,更加友好的人机界面、语言、图形编程界面正在开发中。基于PC机的机械手控制器和网络控制器的标准化已成为研究热点[16]。
(5)虚拟机器人技术:许多特殊的机器人,在空间、水下、地面、地下、农业和食品加工、消防救援、医疗护理、休闲娱乐等方面,远程控制都可以作为主要手段。基于多传感器、多媒体和虚拟现实技术的虚拟远程操作和人机交互,将成为一项需要共同开发的技术。
2 系统方案设计
2.1 机械手结构及自由度确定
根据课题要求设计,机械手自由度为3-5个,在结构要求简单的前提下对机械手进行设计
方案一:选择四个自由度结构,腕部旋转副,小臂旋转副,大臂旋转副和底座的一个旋转副的四自由度结构。见图2-1。
图1-1 机构简图
方案二:在考虑结构简单的情况下,由移动平台自身的旋转来代替底座自由度的旋转,设计机械手的自由度为腕部旋转副,小臂旋转副和大臂旋转副三个自由度。
两种方案中,方案二结构相对简单,同时可以利用行走机构来实现机械手水平方向的旋转,但是在相对狭小的环境中,不利于行走机构旋转的情况下,方案一中底座的旋转就更合理,因此在两种方案的比较中选择第一种方案。
2.2 驱动方式的选择
机器人关节的驱动方式有液压、气动和电动三种。
(1)液压驱动方式输出的力和功率较大,可以形成大型机器人常用的伺服机构的关节驱动。
(2)气动机器人主要用于开关控制和顺序控制。
(3)电机驱动可分为普通交流电机驱动、交直流伺服电机驱动和步进电机驱动。电机驱动适用于中小型机器人,精度高,可控性好。
考虑到机器人的轻便与机械手的准确性,我选择电动式驱动作为机械手的驱动方式。
2.3 行走机构的选择
机器人的行走机构主要有车轮式行走机构、履带式行走机构和足式行走机构三种。
虽然履带式行走机构和足式行走机构能够适应更加崎岖的环境,但是考虑到工作环境的复杂程度与结构的简单性,我们选择车轮式行走机构,确定使用车轮式行走机构后,提出两种方案
方案一:采用三轮行走机构,采用前轮转向,两后轮独立驱动的方式。
方案二:采用四轮行走机构,通过四个轮胎差动驱动的方式来进行转向。
两种方案中四轮机构相对于三轮稳定性更高,因此选择四轮行走机构。
经过以上方案的比较分析,我选择了4个自由度的机械结构,机械手的腕部,肘部,肩部和底座旋转四个自由度,同时为了保证机械手运行的准确性与操作的简便性,并且为了方便坚持维修,确定采用步进电机驱动。考虑到结构简单,机械手的行走机构采用轮式行走机构,并选择使用最广泛的四轮行走机构,采用四个轮胎差动减速器驱动来实现机器人的转向。
3 机械系统原件的选型设计与校核
3.1 机械手爪与腕部的选型设计
3.1.1 机械手爪的选型
机械爪夹持工件的受力分析如图3-1所示:
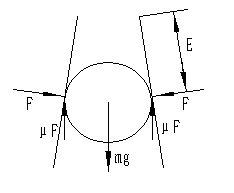

图3-1受力分析
从图中可以看出,两个手指的夹紧力产生的摩擦力为2µF,该摩擦力必须大于被夹紧工件的重力mg,考虑到工件运输过程中的加速度和冲击力,必须设置一个安全系数S,故应满足
2μF>Smg (1)
式中:F——机械爪夹持力(单位N);
S——安全系数,取S=2;
m——夹持工件质量,m=2Kg;
g——重力加速度,g=9.8m/s2;
µ——机械手爪夹头与工件的摩擦因数,一般µ=0.1~0.2,取µ=0.2。
则所需夹持力F>196N,因此,我选择了LEHZ40K2-30-R16N1电动夹爪。
最大夹持力为210N,符合要求。机械手爪如3-2所示。
图3-2 机械手爪
3.1.2 机械手爪与腕部连接件设计校核
考虑到课题换机设定为高辐射环境,因此零件设计要在保证整体强度足够的情况下,保证机械手的轻便和防辐射性能,在材料的选择中,铝合金的结构强度好,较为轻便,但是防辐射性能不好,铅合金的防辐射性能好,但是铅合金质量较重,并且强度硬度较低,在比较中,我选择了响度相对较高哦并且有一定防辐射能力的合金钢作为各零件的制作材料。
腕部与机械手爪的连接件设计如图3-3所示:
图3-3 腕部与机械手爪的连接件
根据零件所受到的力进行有限元校核,结果如图3-4所示:
图3-4 腕部与机械爪连接件应力分析
根据有限元分析结果,最大应力4.286e+06N/m^2小于屈服应力2.068e+08N/m^2,所以该零件强度足够。
3.1.3腕部电机选择
为了保证机械手的操作简单性和保证机械手更加容易检查与维修,驱动电机我选择步进电机来进行驱动,由于机械手要求扭矩较大,因此选择合适的减速器来增加扭矩,我选择的是行星减速器。
腕部电机与减速器选型计算
工件质量2kg,机械手爪质量约为1.8kg,腕部连接件质量约为0.9kg
腕部电机受到的力矩约为T1=20N*0.2m+18N*0.1m+9*0.15m=7.15N·m
根据腕部旋转副算的的扭矩,我选择了42步进电机,型号为42HB48-401A,保持力矩为0.6N,电机重量为0.35kg
行星减速器型号为NPF42-15-K-P2-步进电机,减速器额定输出力矩为15N·m,行星减速器减速比为15,减速器的质量为0.55kg,行星减速器效率η取0.98。
T1’=0.6*15*0.98=8.82N·m>7.15N·m
经过计算电机与行星减速器符合要求。
3.2 小臂与肘部电机的选型设计
3.2.1 小臂的设计与校核
为保证小臂在轻便的情况下,保证小臂有足够的强度,采用由两块钢板通过钢柱铰接来组成小臂部分,结构如图3-5所示:
图3-5 小臂结构图
根据小臂部分受力情况,对小臂的一侧进行有限元校核,结果如图3-6所示:
图3-6 小臂零件有限元应力分析
根据有限元分析结果,最大应力7.437e+06N/m^2小于屈服应力2.068e+08N/m^2,所以该零件强度足够。
3.2.2 肘部驱动电机与减速器的选择
肘部驱动电机与减速器选型计算
工件质量2kg,机械手爪质量1.8kg,腕部连接件质量估计0.9kg,腕部电机质量0.35kg,腕部减速器质量0.55kg,小臂质量约为1.6kg
肘部驱动电机受到的力矩约为
T2=20N*0.6m+18N*0.5m+9N*0.55m+9N*0.4m+16N*0.2m=32.75N·m。
根据肘部旋转副算的的扭矩,我选择了57步进电机,型号为SHSTM57-1.2-S-79-6-5.8。电机保持力矩为1.5N·m,电机质量为1.1kg
行星减速器型号为NPF60-25-K-P2-步进电机,减速器额定输出力矩为40N·m,减速比为25,减速器的质量为1.2kg,行星减速器效率η取0.98。
T2’=1.5*25*0.98=36.75N·m>32.75N·m。
经过计算电机与行星减速器符合要求。
3.3 大臂与肩部电机的选型设计
为保证大臂结构的轻便性与强度的稳定性,同样采用和小臂相同的结构形式,大臂结构如图3-7所示
图3-7 大臂结构图
根据大臂部分受力情况,对小臂的一侧进行有限元校核,结果如图3-8所示:
图3-8 大臂零件有限元应力分析
根据有限元分析结果,最大应力3.337e+07N/m^2小于屈服应力2.068e+08N/m^2,所以该零件强度足够。
3.3.2 肩部驱动电机与减速器的选择
肘部驱动电机与减速器选型计算
工件质量2kg,机械手爪质量1.8kg,腕部连接件质量估计0.9kg,腕部电机质量0.35kg,腕部减速器质量0.55kg,小臂质量约为1.6kg,肘部电机质量为1.1kg,肘部行星减速器质量为1.2kg,大臂质量约为3.1kg
肘部驱动电机受到的力矩约为
T3=20N*1.2m+18N*1.1m+9N*1.15m+9N*1m+16N*0.8m+11N*0.6m+12N*0.6m+3.1N*0.3m
T3=90.86N·m。
根据肘部旋转副算的的扭矩,我选择了86步进电机,型号为86BYG250B。电机保持力矩为4N·m,电机质量为2.95kg
行星减速器型号为NPF90-25-K-P2-步进电机,减速器额定输出力矩为100N·m,减速比为25,减速器的质量为3kg,行星减速器效率η取0.98。
T3’=4*25*0.98=98N·m>90.86N·m。
经过计算电机与行星减速器符合要求。
3.3.3 支架设计与校核
通过支架支撑固定安装机械手,支架设计零件如图3-9所示
图3-9 机械手支架零件结构
根据机械手支架部分受力情况,对机械手支架的一侧进行有限元校核,结果如图3-10所示:
图3-10 机械手支架有限元校核应力分析
根据有限元分析结果,最大应力1.328e+06N/m^2小于屈服应力2.068e+08N/m^2,所以该零件强度足够。
3.4 旋转底盘结构设计与分析
3.4.1旋转底盘结构设计与选型
由于旋转底盘扭矩要求较高,单独使用电机驱动容易造成扭矩不足的问题,因此我采用的是电机通过一对齿轮来增加扭矩,通过齿轮输出轴来带动转盘旋转达到带动机械手旋转的目的。转盘结构图如图3-11所示
图3-11 转盘结构图
旋转底盘扭矩计算
J=0.5*mr^2(2)
T=Jα(3)
其中工件质量2kg,机械手爪质量1.8kg,腕部连接件质量估计0.9kg,腕部电机质量0.35kg,腕部减速器质量0.55kg,小臂质量约为1.6kg,肘部电机质量为1.1kg,肘部行星减速器质量为1.2kg,大臂质量约为3.1kg,支架质量约为0.8kg,肩部电机质量为2.95kg,肩部行星减速器质量为3kg,其他连接件,固定零件约为5kg
m取为30kg,r取工作范围1m为旋转半径,α角加速度取5rad/s2
计算得扭矩T4=75N·m
根据旋转底盘扭矩选择齿轮组与步进电机。
我选择的是110步进电机,型号为SHSTM110-1.2-S-99-4-6.5,保持力矩为21N·m
输入轴齿轮选择为GEAKBG2.0-21-20-B-19N,容许传递力为47.87N·m,齿数为21,模数为2.0,压力角20度。
输出轴齿轮选择为GEAKBG2.0-84-20-A-40N,容许传递力为282.76N·m,齿数为84,模数为2.0,压力角20度。
T4’=21N·m*84/21*η
η取0.98
得T4’=84N·m>75N·m,根据计算结果,该齿轮组与步进电机符合要求。
3.4.2 旋转底盘零件设计与校核
为了保证步进电机能够稳定的工作,需要设计一个支架来固定步进电机,步进电机支架的设计如图3-12所示:
图5-12 步进电机支架结构图
同时对转盘零件与齿轮轴进行设计与有限元,保证转盘强度足够。结果如图3-13到图3-16所示:
图3-13转盘零件图
图3-14 转盘有限元应力分析
根据有限元分析结果,最大应力1.289e+06N/m^2小于屈服应力2.068e+08N/m^2,所以该零件强度足够。
图3-15 齿轮轴零件图
图3-16齿轮轴有限元应力分析
根据有限元分析结果,最大应力1.209e+07N/m^2小于屈服应力2.068e+08N/m^2,所以该零件强度足够。
通过各种规格的螺栓将各个零件连接固定起来,得到机械手结构,如图3-17所示:
图3-17 机械手装配图
3.5 移动平台选择
根据机器人活动环境对于移动能力的要求不高,采用车轮式行走机构,最终确定采用四轮行走机构,通过资格轮胎差动驱动的方式来进行装箱,并根据环境的辐射性选择合金钢材料的移动平台来选择机械手的行走机构,最终根据机械手的尺寸以及载重选择了JUJON的路虎移动机器人底盘,配备大扭矩四驱动力系统以及全地形轮胎,可实现原地转弯,最大载重为70kg,符合要求。实物如图3-18所示:
4 机械手运动分析
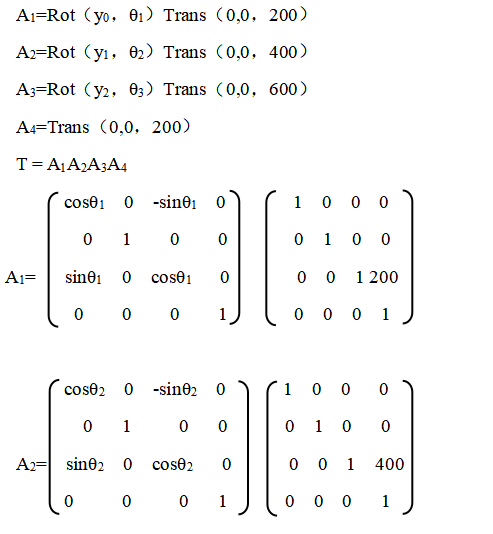
机械手的运动分析通常采用D-H矩阵的方法来对机械手的运动进行求解,通过矩阵来表现连杆的平移与旋转。采取矩阵的方式能够更加直观便捷的对机械手的运动进行分析。
本课题机械手为四自由度机械手,在固定坐标系中看,机械手底盘的旋转可以看做是一个绕着z轴旋转的自由度,该自由度的可以再任意角度运动。肩部旋转副可以看做是肩部在一空间坐标系中大臂绕y轴旋转的旋转副,旋转角度可实现上下120度的旋转,肘部旋转副可以看做是肘部在一空间坐标系中小臂绕y轴旋转的旋转副,旋转角度可实现上下120度的旋转,腕部旋转副可以看做是腕部在一空间坐标系中大臂绕y轴旋转的旋转副,旋转角度可实现上下120度的旋转。
对四自由度移动机械手进行分析如图4-1所示:
图4-1 四自由度机械手分析
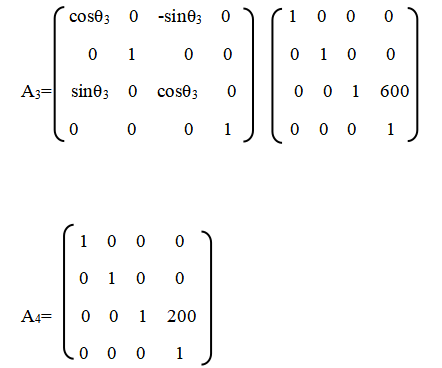
该机器人的运动学方程为 T = A1A2A3A4
连杆参数如表4-1所示:
| 连杆 | 转角θn | 连杆间距dn | 连杆长度an |
| 1 | θ1 | d1=0 | a1=l1=200 |
| 2 | θ2 | d2=0 | a2=l2=600 |
| 3 | θ3 | d3=0 | a3=l3=400 |
| 4 | θ4 | d4=0 | a4=l4=200 |
表4-1 连杆参数
结 论
经过这次毕业设计,我查阅了很多相关资料,了解到了机器人学发展现状,对本身专业有了进一步的理解和认识,同时在设计中发现了很多问题,在与指导老师高春艳老师的交流中,我了解到了很多关于机器人的知识。在结构设计中,我利用到了机械设计方面的知识,同时跟深入的了解了机器人学的知识。在驱动机构设计与选型中,我利用了液压与气压,和机电传动的知识,并实际对驱动机构进行选型。同时,还利用图纸绘制了机械手的结构,并利用solid works等软件绘制了三维图纸,并对零件进行了校核。通过这次毕业设计,总结了大学四年的知识,并结合实际加以应用,为以后的学习和工作提供了帮助,巩固了基础。
参 考 文 献
1郑笑红,唐道武.工业机器人技术及应用.北京:煤炭工业出版社,2004
2 张涛.机器人引论.机械工业出版社,2017
3张福学.机器人技术及其应用.北京:电子工业出版社,2000
4 郝英好.机器人技术发展及其对经济和社会的影响研究[J].新型工业化,2016,6(11):68-74.
5张关富.机器人概述[J].控制工程,1985(03):40-47.
6蔡自兴.机器人学的发展趋势和发展战略[J].机器人技术与应用,2001(04):11-16.
7刘宇红,张明路,孟宪春,刘淑英,杨戈.移动机械手的稳定性及补偿方法现状与发展趋势[J].机电产品开发与创新,2008(02):5-7.
8Corrado,Joseph K.,”Military Robots,”Design News,October 83,pp.45-66.
9http://www.jpl.nasa.gov/picttures/.
10″Stanford Rehabilitation Center,”Stanford University,California.
11 Wernli,Robert L.,”Robotics Undersea,”Mechanical Engineering,August 1982,pp.24-31
12 http://static.nfapp.southcn.com/content/201611/01/c165979.html?from=groupmessage
13 刘淑良,邵浩,高波,杨宏,赵言正,王炎.壁面清洗机器人及其控制系统[J].黑龙江自动化技术与应用,1997(03):42-45.
14 孙迪生,王炎编著,机器人控制技术[M].机械工业出版社.
15 智能服务机器人.http://robot.supcon.com/products_waiter.asp.
16 西格沃特R,诺巴克什IR.自主移动机器人导论.西安交通大学出版社,2006.
17 李佳宁,易建强,赵冬斌,邓旭玥,西广成.一种全方位移动机械手的体系结构设计与分析[J].机器人,2004(03):272-276.
18 张建畅. 基于移动机械手的危险化学反应器泄漏监控与修补系统技术研究[D].河北工业大学,2008.
19 李建佳. 履带式移动机械手系统建模及控制技术研究[D].天津理工大学,2012.
20 蒋文萍. 移动机械手整体控制系统的设计与分析[D].天津大学,2010.
21 杨草原,张超.模块化移动机械手臂设计[J].机械研究与应用,2019,32(03):115-118.
22 于复生;沈孝芹;张涵;董茂起;王雪;张荣禄;张朝;张正珣;徐礼学,一种五自由度电动机械手[P].中国专利:CN202323512U,2012-01-25.
23 刘玉飞;吴靖文;张席;訾斌;许德章;钱森;汪步云;鞠锦勇;路恩;潘瑞;沈亚兰,一种混联式移动机械手[P].中国专利:CN108032282A,2018-05-15.
24 王绪全. 六自由度机械手臂及移动机器人控制系统研究[D].燕山大学,2016.
25 龙彦泽;陈骞;王增帅;魏超,一种五自由度多功能机械加工设备[P].中国专利:CN208132982U,2018-11-23.
致 谢
时间过得很快,大学四年的时光就这样过去了,在这四年的时间里经历了很多事,认识了很多朋友,学到了很多知识,自己在这四年的学习中了解到了很多,这与老师的教导,同学的帮助,还有自己的一点点努力是离不开的。
首先感谢xxx老师在这次毕业设计中的悉心指导,让我了解了很多本专业的知识,在这次毕业设计中更贱深刻的了解到了本专业的知识,这次毕业设计是对我大学四年来学习成果的一个汇总与检验,在这次毕业设计中提高了自己的分析能力,动手能力,绘图能力,做事严谨的性格等等一系列方面,是我人生中的一次重要的经历与体验,为我以后的学习和工作提供了很大的帮助。
其次我要感谢大学期间所以任课老师和辅导员对我的细心关照和严格要求,为我在学习和生活中停工了很多帮助,让我学习到了很多知识和很多社会经验与为人道理,为我以后在社会中婷婷公里宝贵的经验。
同样我要感谢每一位和我一样在异地求学的同学和朋友,感谢他们对我的关心和支持,使我在大学的每一天的生活的过得充实有趣,给我留下了难忘的记忆。
最后我要感谢我的父母家人,为了我在外求学,他们每天辛苦工作供我上学,没有他们的照顾和支持就没有我的今天。

1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:1158,如若转载,请注明出处:https://www.447766.cn/chachong/134352.html,