摘 要
一直以来,农业上防治病虫灾害的有效手段即为对农作物进行农药喷洒。然而,与其他发达国家相比,我国施药技术的落后导致农药的大量浪费,较低的农药利用率不仅提高了防治病虫害的成本,对生态自然环境的破坏也日益严重。尤其针对新疆大田种植玉米作物,施药面积大、用药量多,如何实现减药增效尤为重要。为提高我区农药利用率,提出应用变量施药技术,以苗期玉米植株为研究对象,研究设计一套适用于自走式喷药机的间歇施药控制系统,以期改善施药效果,降低农药污染。
本文的主要研究内容如下:
(1)以施药机具、施药技术角度出发,综述国内外间歇施药控制系统研究现状,通过对比对象检测传感器文献成果,结合本研究对象特征,优选超声传感器感知苗期玉米植株。根据系统设计目的与要求,研究确定了技术路线。
(2)搭建了间歇施药控制硬件系统:设计了间歇施药液压回路,确定了液压元件参数;开发了基于PLC的电控系统,规划了PLC外部电路以及电磁阀驱动电路。
(3)构建了系统压力控制模型与流量控制模型,基于作物超声检测高度,建立了间歇喷药变量控制模型。研究了基于PID的施药系统压力稳定控制算法,并完成模型仿真分析。
(4)设计了基于PLC的系统控制软件,完成上位机软件开发。
(5)搭建了间歇施药控制系统试验台,苗期玉米间歇施药台架试验结果表明:间歇施药控制系统性能良好,流量控制精度误差在±5.57%以内,压力闭环控制相对误差在±4.71%以内,满足作业要求。
关键词:玉米苗期,间歇施药,PID控制,PLC。
第一章 绪论
1.1研究背景和意义
1.1.1玉米种植特点
玉米起源于美洲大陆,一年生雌雄同株异花授粉植物,植株高大,是重要的粮食作物和饲料作物[1]。16世纪传入中国。因其广泛的生态适应性和丰产性,丰年可作饲,歉年可供粮,而且是转化为肉奶蛋的主要饲料。因此,在中国其种植面积迅速扩大。中国2017年玉米种植面积6.36亿亩,超过稻谷(4.52亿亩)和小麦(3.64亿亩),位居三大主粮作物之首[2]。在新疆,玉米种植面积仅次于棉花,是本地区极为重要的经济作物。
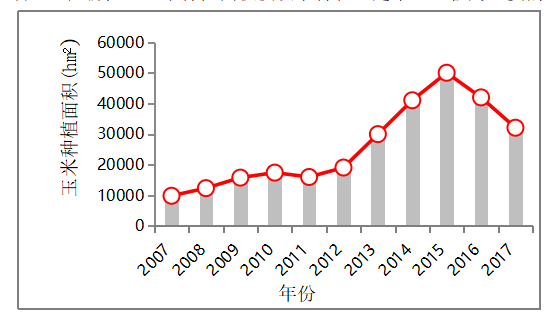

图1-1新疆玉米种植面积
Fig.1-1Corn planting area in Xinjiang
玉米苗播种到拔节的时段被称作苗期,根系的发育及茎叶的分化主要在这一阶段进行,作为营养生长的阶段,苗期抵抗病虫害的能力不足,一旦发生病虫害,将造成大批量的玉米苗死亡,进而导致田间垄断。因此,苗期既是地下害虫肆虐造成危害也是粗缩病等病害发生的高危期[3],应用可靠的植保手段即物理防治措施结合化学防治的方法能够有效控制苗期病虫害,保证作物正常生长。

图1-2玉米苗期
Fig.1-2 Corn seedling stage
一般玉米在拔节之前(即苗期)需要喷洒三次农药。玉米在三至五叶期,杂草二至四叶期,是苗后除草剂的最佳使用期,喷药时需定向喷雾,避开玉米心。在打过除草剂7天后,一定要防治玉米粘虫和钻心虫。玉米8叶期为控旺,防病,增产的最佳时期。控旺防倒很关键,同时,喷施杀虫剂,杀菌剂,芸苔素内酯和功能性叶面肥,防病,杀虫,增产一次性完成[4]。

图1-3 玉米苗期施药
Fig.1-3 Corn seedling application
1.1.2研究意义
虽然我国植保机具类型繁多,但由于多采用传统连续喷药作业模式,具有施药效率低、农药被大量浪费、农作物中农药残存现象严重、施药工作人员易中毒以及对生态环境造成污染等问题[5]。对农作物质量的消极作用会直接影响到我国的农产品出口,同时也会对广大消费者及农场工人的生命健康造成威胁。综上,目前我国农药先进的生产水平与落后的农药施用技术及农作物保护设备之间出现了严重的不协调。因此,亟待探索并攻克精准施药技术难题,开发研制先进适用的植保机械,不仅可有效防治农产品病虫害,对提高农作物产量与质量、减轻对生态环境的破坏及保障人民生命健康具有重要意义。
相比传统喷药作业模式,间歇喷药技术能够区分作物对象与土壤背景,做到对靶喷施,且能够根据作物对象植被特征调整喷药量,从而有效降低药量使用,实现节约作业成本,降低环境污染,提高喷施作业质量的目的。间歇喷药技术核心包括两方面,即农作物喷施作业信息获取和变量施药的实时控制。间歇喷药技术通过对喷施目标的持续检测以达到精确喷施的目的,通过接收检测目标的信息反馈调整输出,进而实现提高农药喷施的精准度与有效性等目标。
1.2喷雾机的发展
高效的农药、先进的作业机具以及规范的施药技术是提升植保作业效果的三大重要手段[6]。早在上世纪九十年代,德国、日本、X及澳大利亚等国家已开启了对农药喷施系统的研发与应用工程,在本世纪初,通过多年的研究、测试与探究,形成了以实时传感技术及处方图为基础的农药应用可变量系统控制技术[7-10]。并且,由有关研究人员开发的农作物识别及施药决策控制的技术与算法已被广泛应用在实际生产中,该算法在变量施药控制系统中的应用极大的推进了系统设计的市场化。例如,北美洲的一些具有较大规模的农场早在1996年就将全球定位系统(GPS)应用到了农药喷施中,利用搭载GPS系统的飞机进行农作物施药[11-14]。信息化时代的飞速发展使相关研究者意识到了发展变量喷药技术对节约经济成本及改善自然生态环境的重要性,在此基础上,近年来欧美等发达国家投入了大量的资金与研究人员进行变量喷药技术的开发与钻研,目前已取得了显著的成效,已有很多国家成功将该项技术投入到实际生产应用中。比如,一些企业(X的CASE公司、John Deer公司及丹麦的Hardi公司等)已实现大、中型喷药设备的量产,且成功在大规模农场中应用。相比之下,我国的农药生产水平虽然处于世界先列,然而农药喷施设备及施药技术的发展却十分落后,尚处于发达国家20世纪80年代左右的水平。20世纪70年代末,背负式手动喷雾器因其结构简单,价格便宜的优势成为国内当时重要农机具之一。90年代初期,个别农户所承包的农田面积的增大使得背负式机动弥雾机的使用开始普及,主要以泰山-18型、稼兴及东方红-18型等为代表。[15]。随着国内农业技术的发展,植保施药机械也顺应时代的潮流,发展模式从最初的模仿借鉴改为自主创新开发,从手动人力喷药发展为电动、机动施药,部分地区甚至应用了农用飞机以及大、中型自走式设备等先进的喷药设施。其中牵引式喷药机是以拖拉机为牵引并在其后配置一套可以通过液压装置调整离地间隙和轮距可以适应多种种植模式的施药设备,具有喷药效率高、喷洒面积大以及省力、省时等优点[16]。我国目前用于病虫害防治及植保的设备主要有手动压缩式喷雾机,手动背负式喷雾机,手动踏板式喷雾机,背负式喷粉喷雾器,机动担架式喷雾器,拖拉机悬挂或牵引的喷杆式与风送式喷雾器,小型机动喷烟机及航空喷雾喷粉等设备[17]。
(a) John Deer变量喷雾机(b) 背负式喷雾机
(c) 牵引式喷雾机(d) 航空喷雾机

图1-4喷雾机
Fig 1-4 Sprayer
1.3施药技术研究现状
间歇、变量施药技术是提高农药利用率、降低农药使用量的先进手段,逐渐成为精准施药技术及装备领域的研究热点。变量施药技术的实现主要由决策生成和决策执行两部分组成[18],设备进行施药作业前,借助专门的传感器感知对象信息(位置、形状、密度等)并将信息反馈到处理器中,随后,对象信息被系统处理器采用信号处理的方式分析并处理,输出的对象状态及其测试结果等有效信息将被输入到控制系统中进行目标喷施作业。因此,喷施目标的信息采集方式和流量控制系统的方案设计是整个系统能否实现精确变量施药的关键。
1.3.1基于实时传感器的目标信息采集
基于实时传感器目标信息的采集通常通过各类传感器(红外传感器、激光传感器、图像传感器、超声波传感器等)来实时获取喷施目标的轮廓、距离、深度等信息,并通过控制系统分析处理后确定施药量,形成施药决策。实时传感器技术因其精度高、实时性强等特点在变量施药领域里得到了广泛应用。
(1)红外传感器
红外光电传感器通过采集作物对光束的遮挡或反射信息,判断是否存在作物。Brivot[19]以不同植物对各波段的光谱不同的反射特征为基本原理,通过红外线传感器所发射的红外线进行农作物的检测,通过对反射波段的收集,对比分析被探测物的种类,因此可精准的鉴别该植物是杂草还是农作物,准确率高达73%以上。翟长远[20]等使用红外光电传感器探测树干估算树冠位置,设计了幼树果园靶标探测器,并在实验室和果园进行了试验研究。邹伟[21-25]等设计了果园对靶喷药控制系统,根据霍尔(测速)传感器实时检测拖拉的行驶速度,采用红外传感器列阵探测果树树冠,传感器中电磁阀开关的频率主要通过靶标的检测信号以及红外线的行驶速度进行控制,完成对喷头流量的控制,实现了基于果树树冠检测的对靶变量施药。该传感器造价低廉,但无法测定距离及作物位置。
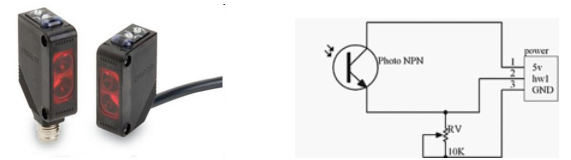
图1-5 红外光电传感器
Fig.1-5Infrared photoelectric sensor
(2)激光传感器
激光传感器[26]将激光束投射到被测物表面,通过采集反射光可计算获得对象二维坐标值。李龙龙[27]等人设计了一种基于变风量与变喷雾量的果园自动仿形喷雾机,喷雾系统以冠层分割模型作为变量处方,采用扫描精度高的激光传感器作为探测源,执行元件由无刷直流风机以及电磁阀构成,风机的转速以及喷头的流量大小根据所检测的果树冠层的体积对电机及电磁阀的PWM脉宽调制信号的调节实现实时调节。但是单组激光传感器光束覆盖范围小,若覆盖冠层需形成多组排布,则需增加成本。
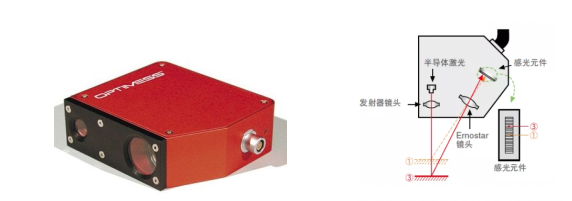
图1-6激光传感器
Fig.1-6Laser sensor
(3)机器视觉传感器
通过作物图像采集及算法处理,定位目标位置与冠层面积大小。刁智华[28]等设计了人视觉传感式除草剂变量喷洒系统利用CCD数码相机对农田进行扫描,对杂草和农作物进行鉴别,根据杂草的多少来控制喷药量。陈勇[29]等通过结合机器视觉及模糊控制的原理进行了农药精确可变量喷药控制软件的设计与研发,其工作过程为:首先在模糊控制的基础上对树木的距离及其体积进行初步判断,根据模糊决策的结果对喷头进行选择并组合,下一步控制农药的射程及喷头的流量大小,从而完成对该树木的智能喷药过程。尹东富[30]等通过摄像头(CCD)对植物的图像进行采集,并采用装配TMS320DM642的处理器(DSP)对采集到的图像信息进行处理,以鉴别农作物与杂草,随后将杂草的数量信息及其位置通过串口通信(RS232)的方式输入到装载S3C2410的微处理器(ARM9系列)中,杂草密度及其位置的相关信息被ARM9微处理器处理后,触发相应电磁阀的开关,对杂草进行精确对靶施药。根据杂草数量,结合当前设备行进速度对施药量进行计算,调整不同的PWM占空比实现设备喷头的调整,达到根据杂草密度变量施药的目的。图像传感器检测精度高,可准确定位作物,获取作物冠层面积,但其价格昂贵且无法适应恶劣的田间环境。
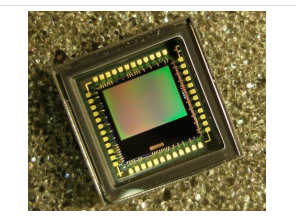
图1-7图像传感器
Fig1-7Image Sensor
(4)超声波传感器
超声波传感器和红外传感器相比较而言,探测面积大,可以有效的避免此类现象。刘雪美[31]等以大田喷杆喷雾机为载体,将超声波测距传感器按一定距离分布安装在喷杆上,使其识别靶标位置实现精准对靶。A.Miranda-Fuentes[32]等针对密集的橄榄果园开发了新的空气辅助喷雾机,其采用的超声波传感器定位目标,同时控制电动阀门开闭。早在1988年,Roper等人[33]通过在喷雾机的不同位置处设置超声波传感器的方式对施药目标的结构与距离进行测量,进而实施变量施药。Giles等人[34]的研究结果显示,超声波传感器可对果树宽度及高度进行准确的高于90%的精准探测,由于空气介质中波的运动难免出现扩散,扩散角度过大导致测量树冠细小间隙的能力较差。许林云[35]等设计了自动对靶喷雾控制系统,该系统以GY8履带自走式果园喷雾机为载体,采用传感器测距方式探测果树,实现自动对靶喷雾。张海锋[36]等对GY8型果园喷雾机的喷雾压力、测点位置、风机转速对雾滴粒径的影响以及冠层位置、喷雾机行驶速度对雾滴覆盖率和穿透性的影响进行了研究。
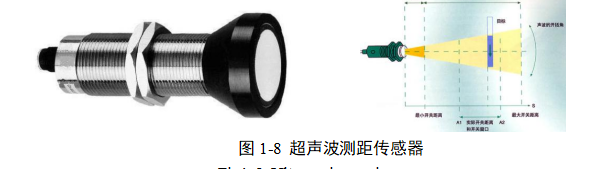
图1-8 超声波测距传感器
Fig1-8.Ultrasonic ranging sensor
1.3.2变量控制系统
(1)核心控制器
变量施药控制系统是变量施药的核心,主要是利用控制器对采集的信号处理并按照一定的算法进行控制。翟长远[37]等基于单片机AT89C52设计了一种车载式变量施药控制系统,可根据施药机的行驶速度来自动变换施药量。莽璐[38]等基于AT89S52单片机的开发环境下,根据上位机对CCD采集的病害信息处理结果,对喷杆行走速度和喷头流量进行控制,实现无人自动变量施药。喷杆的位姿是影响喷雾机喷药质量的因素之一,陈文坊等[39]通过在喷杆中装载AT89S52微处理器开发了一套可调整喷杆位姿的设备,该设备可保证施药过程中喷杆与植物冠层之间位姿的正确。裴亮、沈成杰等[40]则以电动比例调节阀为执行器,以PLC为控制器设计了直接控制流量的变量施药装置。孙永佳[41]等基于TMS320F28335开发一套根据设定的单位面积内的喷药量和作业速度自动调节阀门开度的变量喷雾控制系统,实现了变量喷雾施药。王利霞[42]等设计了一套基于ARM7系列的S3C44BOX微处理器为核心的,具有手动控制、自动控制、和试验标定3种工作模式的变量喷药控制系统。陈宏[43]等以ARM7系列S3C44B0X微处理器为核心,在实现3种工作模式基础上研制了一套具有变量施肥、喷药和灌溉3种作业类型的多功能变量作业控制系统。目前单片机的发展良好,价格便宜,但抗干扰能力差,虽然PLC相对而言成本较高,但抗干扰能力强,在田间作业中优势明显。
(2)控制策略
控制系统的流量控制策略有多种选择,主要有PID控制、模糊控制、PWM控制以及模糊PID控制等。
1)PID控制
郭娜[44]等在Smith预估控制的喷药流体网络模型的基础上与PID控制结合在一起,设计了一套旁路节流式变量施药的控制系统。宋乐鹏[45]等设计了变论域自适应模糊PID控制算法。宋淑然[46]等对果园管道喷药系统管道中药液压力采用了带变速积分、微分先行优化算子的自整定模糊PID控制。
2)模糊控制
董志明[47]等在控制的模糊自整定基础上开发了一种控制方式。根据对变量喷雾控制系统的数学建模,建立了以电动调节阀为核心的模糊自整定控制系统。邵陆寿[48]等将模糊控制技术应用于变量施药控制系统中建立自适应喷雾控制系统,实现农药使用过程自动调节喷雾参数。
3)脉宽调制(PWM)控制
PWM控制是通过不同占空比信号控制电磁阀的开闭时间来实现流量控制。史万苹[49]等提出了基于国产变量喷药机的PWM变量控制技术,在普通喷头的入口处装配了国产电磁阀,喷头的施药或停止可由国产电磁阀的开关进行控制。蒋焕煜[50]等构建了一套可采集测量喷头喷雾压力数据的PWM变量喷雾实验平台,通过喷头压力与流量关系特性,经卡尔曼滤波算法得出喷雾瞬时流量数据,并对其积分得到喷雾流量;将经过滤波后的喷雾流量和PWM信号的占空比通过自动分段线性拟合方法进行关联,从而完成了PWM喷雾流量模型的建立。李龙龙[51]等基于高频电磁阀设计了高于20Hz的脉宽调制变量喷雾系统,并测试了不同频率和占空比对流量、雾滴粒径、雾化过程、纵向沉积均匀性的影响。魏新华[52]根据脉宽调制(PWM)控制原理开发的PWM间歇喷雾式变量喷施系统已被成功装载在3WX-200型悬挂式喷杆喷雾机上。
从总体水平上看,信息技术、机器视觉及微电子技术等高端技术在喷药器械中的逐步应用促使病虫害防治领域向精准、高效、低成本及智能化、自动化发展。然而,我国的植保器械设备自动化和智能化水平较低,较发达国家还有一定差距。因此,针对当前国内植保机械面临的诸多问题,必须针对关键技术问题进行逐项攻破。本课题将借鉴国内外相关技术成果,研究适用于新疆地区玉米苗期喷施作业的间歇施药控制方法,并开展系统搭建与样机试验,为智能喷药装备的设计开发提供技术积累。
通过对比上述传感器成本、功能数量、采集精度等指标,本研究拟选用具有温度补偿功能的超声传感器来获取多项目标信息。针对新疆大田玉米苗期植株喷药作业需求,构建基于超声传感器的施药控制系统,引入作物高度(即作业物距)等因素,基于PLC控制器开发流量控制与系统稳压算法,通过多阀协同调节,实现间歇变量施药。
1.4研究目标和研究内容
1.4.1研究目标
设计出一套适用于玉米苗期喷施作业的间歇喷药控制系统,为后续自走式高秆农作物智能农药喷施设备的开发与研究提供实践基础,为节约喷施成本、提升喷施效率以及减轻生态环境破坏做出贡献。
1.4.2研究内容
(1)苗期玉米对象喷施作业参数信息采集
主要包括苗期玉米植株作业性状统计;监测探头结构设计与优化,包括传感器择选,空间排布方式、安装位置等;信息采集硬件电路的设计;作物信息与喷施量关系模型构建。
(2)间歇喷药控制系统开发
主要有间歇喷药执行机构硬件设计;间歇喷药控制算法开发;人机交互界面的设计,可进行作业参数设置与显示。
(3)系统集成与试验
将间歇施药控制系统软硬件集成并进行台架试验,通过试验数据分析处理对系统进行优化改进,提高系统可靠性。
1.5 技术路线

图1-9 技术路线图
Fig1-9. Technology roadmap
1.6 本章小结
本章对国内外目标农作物的探测以及现有的农药喷施系统进行了深入的调研与分析,在此基础上提出了创建基于超声波传感器的苗期间歇施药系统,对本文的研究内容及技术路线进行了简要阐述。
第二章 系统总体方案及硬件设计
2.1设计总体要求
2.1.1设计目的
区分作物与土壤以及判断施药目标作物的有无是间歇施药控制系统的设计目标,实现对苗精准喷施。根据施药目标作物高度,实现间歇喷洒,提高农药利用效率,减少农药用量和环境污染。“间歇”是通过传感器技术获取目标作物信息,根据作物信息实现非连续变量喷药。
2.1.2设计要求
间歇施药控制系统要求借助专门的传感器感知目标信息传输到控制器中,对信息进行处理和数据分析,并输出控制信息达到控制系统压力与流量有效状态从而有效控制电磁阀的开闭,实现系统间歇対靶施药目的。传感器检测模块与PLC通信,进行喷雾信号的发送,PLC根据传感器的检测信号的分析对喷雾进行控制,对喷雾压力和流量变化进行实时检测,根据实时数据调整喷雾系统,并将数据储存在设备中的PC端。因此,间歇施药控制系统需要实现以下主要功能:
间歇施药控制系统将采用传感器实时采集的植物信息数据传输到PLC中,经由先前设定的处理算法,确定喷雾方案。PLC通过控制减压阀控制压力、电磁阀控制开闭,进行间歇施药,赋予了系统精确的施药量控制能力以及迅速的反应机制。通过对施药量以及喷药压力的连续实时测量与反馈,向PLC模块中输入所收集到的数据,随后PLC模块通过数据分析与处理调整喷雾。
2.2间歇变量施药机总体构成
苗期间歇变量施药机主要由药箱、控制箱、液压系统、喷杆、电动推杆、电磁阀、喷头等组成,如图2-1所示。喷雾机作业时,根据超声传感器检测到的作物信号,经PLC控制器处理后,通过控制与喷头相连的电磁阀开闭,实现间歇变量施药。此外,系统可通过控制电动推杆伸缩调节喷杆距地高度。
1.电动推杆 2.药箱3.控制箱 4.液压系统5.喷杆 6.电磁阀 7.喷头
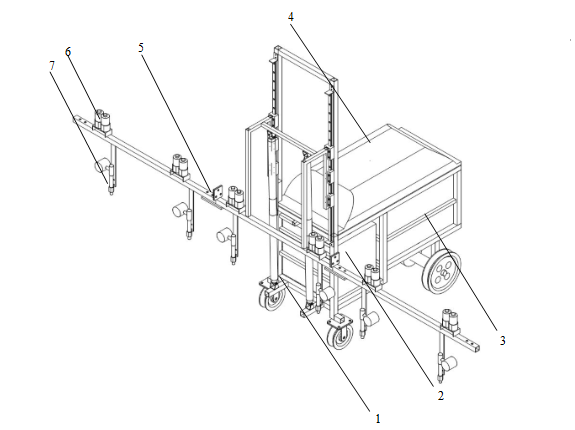
图2-1 喷雾机结构简图
Fig.2-1 Schematic diagram of sprayer structure
2.3控制总体方案确定
2.3.1系统基本组成
根据间歇施药控制系统设计要求与目标,间歇施药控制系统主要包括给药单元,喷施信息检测单元,间歇施药控制单元,作物信息检测单元及施药单元五个主要部分。
图2-2间歇施药控制系统基本组成图
Fig.2-2 Basic composition diagram of intermittent application control system
如图2-2所示,其中各部分功能如下:
(1)给药单元:提供整个系统的药液供给;
(2)间歇施药控制单元:是整个系统的核心组成部分,主要收集感知检测单元输入信息,并通过信号处理方法对输入信息进行数据处理与分析,得到控制信息的有效状态,输出控制信息到控制环节和PC机进行控制和显示。
(3)喷施信息检测单元:实时监测喷施过程中的压力和流量信息,并将数据反馈到间歇施药控制单元中;
(4)施药单元:完成系统药液的喷洒;
(5)作物信息检测单元:通过超声波测距传感器采集现场作物的高度信息,并将信息传输到控制单元。
2.3.2控制系统整体方案
间歇施药控制系统的整体方案是基于PLC控制比例减压阀控制压力、高速开关阀开闭与传感器技术相结合,根据喷雾目标作物的有无区分作物与土壤,对农作物进行间歇性准确喷施,降低农药的浪费及喷施成本,并减轻对土地资源的污染与破坏。
间歇施药控制系统整体结构,由超声波测距传感器、PC、PLC、药箱、过滤器、隔膜泵、蓄能器、减压阀、溢流阀、排气阀、电磁阀、压阻式压力传感器、涡轮流量计、压力表、喷头组成。
根据间歇施药系统的主要组成部分对给药单元,喷施信息检测单元,间歇施药控制单元,作物信息检测单元及施药单元的构成进行详细的阐述:
(1)给药单元:其结构主要由经由主要管路连接的药箱,隔膜泵,粗过滤器,排气阀,减压阀,蓄能器,精过滤器,以及回流管路中的溢流阀所构成;
(2)喷施信息检测单元:主要由主管路顺序的压阻压力传感器,涡轮流量计及压力表构成;
(3)间歇施药控制单元:主要由控制的核心部件PLC、通过主管路连接的电磁阀、主管路中的比例减压阀,以及每个支路的两路电磁阀构成;
(4)作物信息检测单元:包括2组超声测距传感器,一路为对行测距传感器,另一路为对地测距传感器。
(5)施药单元:主要有与主管路连接且六路并联施药支路上的喷头构成,六路均安装在喷杆上;
2.4硬件选择与设计
2.4.1液压系统回路构建
间歇施药控制系统液压回路如图2-3所示,系统液压回路由药箱、卸荷阀、溢流、蓄能器、压力表、手动截止阀排气阀、流量传感器、电磁比例减压阀、单向阀、电磁开关阀、隔膜泵、过滤器、高速开关电磁阀、回流高速开关电磁阀、喷头、压力传感器组成。
间歇施药控制系统主要由喷杆喷头及其管路、药箱、电动隔膜泵、减压阀、高频电磁阀、溢流阀、蓄能器、泵脉动阻尼组件、喷雾控制器及供电单元组成,系统结构图如图2-3所示。系统采用蓄能器与溢流阀,为减压阀调节提供稳定的初始压力、减少泵的脉动压力和系统阀开闭产生的冲击,增加喷头的流量稳定性和准确性。系统采用回流高速电磁阀,减小高速电磁阀开关时间对喷雾动态流量特性的影响。
1.水箱 2.粗过滤器 3.隔膜泵4. 精过滤器 5.溢流阀 6.手自一体电磁阀 7.单向阀 8.截止阀 9.压力传感器 10.蓄能器 11.电磁开关阀 12.流量传感器13.放气阀 14.比例减压阀 15.喷头 16高频电磁阀17.高频电磁阀
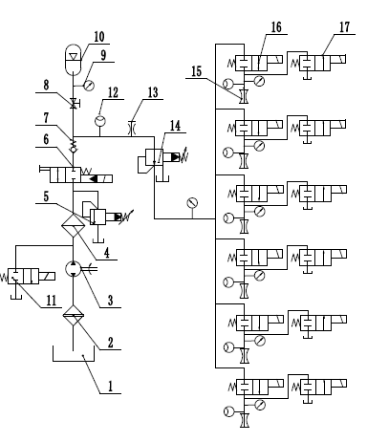
图2-3液压原理图
Fig.2-3Hydraulic schematic
2.4.2药液回路主要元器件选择
(1)隔膜泵
间歇施药控制系统中药液的喷施动力来源于隔膜泵,作为是液压系统中的重要装置,隔膜泵通过隔膜片的来回鼓动来改变工作室容积,进而完成吸入和排出液体的过程。隔膜泵具有不需灌引水、通过性能好、使用寿命长等优点,根据不同介质,隔膜分为氯丁橡胶、氟橡胶、丁晴橡胶等。为尽量减少隔膜泵占有空间和脉冲量,降低隔膜泵的震动影响,保证系统持久的供压稳定能力等要求,本系统选用意大利COME-HPP公司农用MP20系列隔膜泵。如图2-4所示。主要参数如下:
工作压力:0-3Mpa
流量:18L/min
马力:0.2
转速:450
重量:6.6kg

图2-4隔膜泵
Fig.2-4 Diaphragm pump
(2)蓄能器
在液压气动系统中,能量的储蓄主要通过蓄能器完成。在能量过剩或其他适当的情况下,蓄能器会通过将能量转变为位能或压缩能的方式存储能量;能量不足或系统需要时,蓄能器可通过将位能或压缩能转为气压或液压的方式释放储能,为系统补给能量。当系统瞬间压力增大时,它可以吸收这部分的能量,以保证整个系统压力正常。在间歇施药控制系统中蓄能器的作用是保持整个管路压力的平稳,一旦管路的压力增加至承受范围极值附近,蓄能器将存储多余的能量,保持系统处于正常的压力范围内。蓄能器的外形如图2-5所示,参考隔膜泵0MPa-3MPa的范围,选择如下参数型号的蓄能器。
类型:气囊式蓄能器
公称压力:1.5Mpa
体积:0.5L
通径:10mm

图2-5 蓄能器
Fig.2-5 Accumulator
(3)减压阀
减压阀是依靠介质本身的能量将进口压力减小至所需值的出口压力,以确保出口压力保持平稳的设备。根据流体力学的原理,减压阀主要通过改变节流面积进而改变局部阻力,由于流体的流速及其功能的变化对压力的消耗作用,是系统中的压力得以降低,通过系统的调节与控制作用平衡弹簧力及阀后压力的波动。因此,减压阀的主要功能是通过调整系统内管路的压力值,保持调整后的压力值在小误差范围内恒定。参考除减压阀外元件的参数,因此选择力士乐比例减压阀,如2-6所示。因隔膜泵的工作压力为0-3MPa,但管路中的压力在0-0.6MPa范围内,因此需要减压阀将进口的压力值减小到0-1MPa范围内,故选择一下参数的减压阀:
公称压力:1MPa
出口压力:0.2-0.8MPa
连接方式:螺纹连接
材质:不锈钢
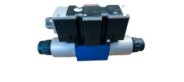
图2-6减压阀
Fig.2-6 Pressure relief valve
(4)溢流阀
溢流阀主要充当系统的安保作用,当系统管路中的压力高于规定值时,溢流阀被顶开,通过将系统中的部分气体排进环境中的方式,降低系统的压力值,保证系统压力不高于临界值,进而防止系统由于压力过大发生事故。溢流阀参数如下:
通径:10mm
压力调节范围:0.3~0.5Mpa
压力调节精度:<5%
压力等级:1Mpa

图2-7溢流阀
Fig.2-7 Overflow valve
2.4.3控制系统主要硬件选择
间歇施药控制系统包括主控制器、超声波传感器、速度传感器、压力传感器、流量传感器,减压阀、电磁阀等部分,如图2-8所示。其中主控制器选用欧姆龙公司生产的CP1H系列PLC,负责处理各传感器检测的信号,控制电磁阀开闭以及根据检测到的压力信号控制减压阀的开度维持系统的稳定性。
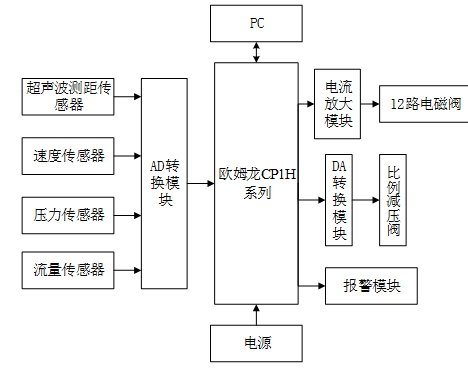
图2-8控制系统硬件结构图
Fig. 2-8 Hardware structure diagram of control system
(1)PLC的选型
PLC可编程逻辑控制器(Programmable Logic Controller,PLC)是一种可将控制指令随时输入内存进行存储及执行的、具有微处理器的用于自动化控制的数字运算控制器[52]。PLC可编程控制器的构成主要包括电源,CPU,数据与指令内存,输入/输出接口以及数字模拟转换等功能单元。早期的可编程逻辑控制器只有逻辑控制的功能,所以被命名为可编程逻辑控制器,后来随着不断地发展,这些当初功能简单的计算机模块拥有了包括时序控制,逻辑控制,模拟控制及多机通信等各类功能[53]。本文选用欧姆龙CP1H系列的可编程逻辑控制器具有以下主要特点:
a)可靠性高。PLC可编程逻辑控制器大部分由单片微型计算机构成,具有较高的集成度以及较强的自我诊断及电路保护功能,因此具有较高的系统可靠性。
b)编程容易。由于使用继电器控制梯形图及命令语句,PLC可编程逻辑控制器的数量远小于微型机,中档及高档的PLC可编程逻辑控制器除外,普通小型的PLC可编程逻辑控制器的语句数量在16个左右。梯形图具有简单且形象生动的特点,便于掌握与应用,即使不具备专业的计算机素养,也可编程。
c)组态灵活。PLC可编程逻辑控制器的积木式的结构导致其具有组态灵活的优点,操作人员可通过简单组合实现控制系统的规模与功能的调整,能够广泛的适配于各种控制系统。
d)输入/输出功能模块齐全。针对开关量,数字量或模拟量,电压或电流及直流或交流等各个信号具有相应的模板可与控制阀,开关,按钮,电机启动器及传感电流变送器等工业现场器件的直接连接,是PLC可编程逻辑控制器的最大优点之一,除此之外,PLC可通过总线与CPU主板相连。
e)安装方便。由于PLC可编程逻辑控制器的安装不需要较高的屏蔽环境及专用的机房,比计算机系统的安装要求低。将检测器件与执行机构和可编程逻辑控制器的I/O接口端子正确连接,即可启动工作。
f)运行速度快。与继电器的逻辑控制相比,PLC可编程逻辑控制器的程序控制极大的提升了可靠性还是运行速度。
本系统选用CP1H系列PLC,24V直流电源型,该型号自带4路模拟量输入,2路模拟量输出,可满足系统中模拟量输出要求。

图2-9 CP1H系列PLC
Fig. 2-9 CP1H series PLC
(2)电磁阀
电磁阀作为本系统重要元件,用来控制喷雾支路的开闭。电磁阀选用直动式两位两通单向电磁阀,如图2-10,通电时,电磁激励会将柱塞拉起,阀门打开;断电时,电磁力消失,弹簧力把柱塞压在阀座上,阀门关闭。该型号电磁阀可靠性高,密封性能比较好,适用于气体和液体,响应速度比较快,满足本系统的功能要求,具体参数如下:
类型:常闭
通径:6mm
压力等级:0.6Mpa
接口;1/8螺纹连接
额定电压:24V
功率:20W
频率:大于10Hz
响应时间:<30ms

图2-10电磁阀
Fig. 2-10 Solenoid valve
(3)压力传感器
本系统中选用陶瓷压阻压力传感器ESP1016系列,采用陶瓷电阻芯体,基于压敏电阻的压阻效应,当陶瓷膜片的前表面由于承受压力而产生较为微小的形变时,由于被印刷在陶瓷膜片背面的厚膜电阻构成了闭合的惠斯通电桥,电桥内部将产生与压力及激励电压皆成正比的高度线性的电压信号,从而通过电子电路的处理,转化成标准的电流信号或电压信号输出。
压力范围:0~0.6Mpa
过载压力:满量程的2倍
精度等级:0.5%F.S.
供电电源:24VDC
输出信号:4~20mA
防护等级:IP65/IP67

图2-11压力传感器
Fig. 2-11 Pressure sensor
(4)流量传感器
整个系统中采集喷施流量数据的液体流量传感器发挥了重要的作用,系统整体的准确度与可靠性主要受到液体流量传感器工作状态的影响。液体流量传感器的结构由电磁流量计,转子流量计,涡轮流量计,浮子流量计,差压流量计及齿轮流量计等构成。其中,涡轮流量计主要通过完成流速与涡轮转速之间的转变以及涡轮转速与电信号的转变完成对流量的测量。系统的总积算流量以及瞬时流量皆可由涡轮流量计检测,检测结果输出为电信号的特性提升了系统的数字化。因此常采用涡轮流量计对系统的流量进行测量并实时输出电信号。系统选用南控仪表公司LWGY系列的涡轮流量计。
其主要参数如下:
仪表口径:20mm
精度等级:0.5%R
材质:304不锈钢
输出信号:4-20mA
供电电源:24V
防护等级:IP65

图2-12涡轮流量计
Fig. 2-12 Turbine flowmeter
(5)超声波测距传感器
本系统选用的CUM18-M1EI系列超声波测距传感器,符合 IP67 防水标准,满足本系统使用要求。该传感器能产生42kHz的超声波,24VDC供电,波束角约为10°;其最大测量范围为1m,分辨率为1cm,刷新频率为10Hz。

图2-13超声波传感器
Fig. 2-13Ultrasonic sensor
2.4.4 硬件系统集成
综上,集成间歇施药控制系统液压部分与电控部分硬件,如图2-14所示。
1.药箱 2.卸荷阀 3.溢流阀 4.蓄能器 5. 压力表6.手动截止阀 7.排气阀 8.流量计 9.电磁比例减压阀 10.单向阀 11.电磁开关阀 12.隔膜泵 13.过滤器 14.高速开关电磁阀 15.回流高速开关电磁阀 16.喷头 17.压力传感器 18.人机操作界面
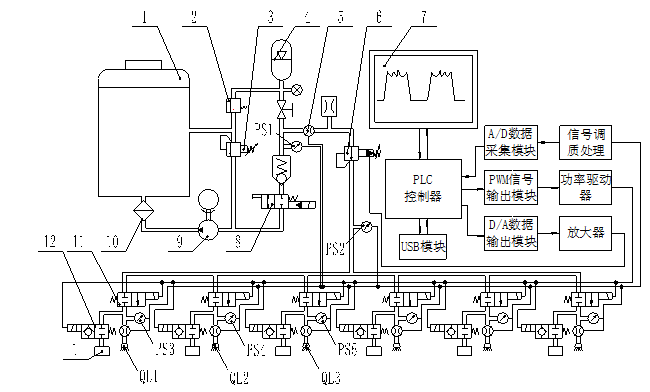
图2-14间歇施药控制系统原理图
Fig. 2-14 Schematic diagram of intermittent application control system
2.5硬件电路设计
2.5.1PLC外部电路
间歇施药控制系统中共有17路输入信号,其中I0.0为开关量输入端口,接入开始按钮。其中4路接在PLC自带的模拟量输入端口,剩余12路与CP1W-AD041转换模块相连。16路输出信号中有1路模拟量输出,其余均为开关量,其中Q0.00~Q1.07为开关量输出端口。PLC控制系统外部接线图如图2-15所示,其中Q0.0~Q1.6与电流放大电路模块相连,间接控制对应电磁阀的通断。

图2-15 PLC外部接线图
Fig.2-15 External wiring diagram of PLC
2.5.2电磁阀驱动电路设计
由于电磁阀工作电流约1A,PLC输出点最大通过电流为0.3A,因此在PLC输出点与电磁阀之间加入电流放大模块,使电磁阀可以正常工作。同时,防止PLC因输出点通过电流过大而损坏。

图2-16电磁阀驱动电路图
Fig.2-16 Solenoid valve drive circuit diagram
2.6本章小结
本章主要介绍了间歇施药控制系统设计目标与要求,设计了施药机整机结构,搭建了液压回路,优选了液压元件参数,设计了基于PLC及外围电路的电控系统,完成元件选型。
第三章 系统控制模型构建及控制算法设计
系统的精准控制主要由其控制算法及控制模型所决定。本章分别对系统中流量与压力的控制模型进行构建与分析,并对系统的控制算法进行设计及仿真分析。
3.1系统控制模型分析及构建
3.1.1压力控制模型分析及构建
比例减压阀控制、压力检测以及控制器控制算法计算构成了系统药液压力控制环节的主要部分。构建原理大致为:控制器运用控制算法对数据进行处理并将电压信号输出,通过对减压阀开度的控制进一步调整系统中的实际压力值大小,其中,压力传感器通过电压-压力转换获取实际压力值。随后,控制系统将获取的压力值进行处理输出电压信号,对喷施压力进行闭环控制。图3-1为该系统的压力控制模型,图中的实际药液压力及控制器的输出电压可由U(s)及P(s)表示。
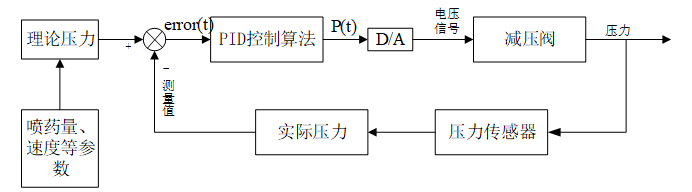
图3-1压力控制模型
Fig.3-1 Pressure Control Model
(1)在不考虑动作延迟性的情况下,比例减压阀传递函数减压阀的出口压力与控制电压成比例关系,因此传递函数可视为比例常数,故比例减压阀根据控制电压执行动作过程输出控制药液压力这一过程的传递函数为:
![]()
![]()
(2)本文中进行液体压力与电压信号转换工作的设备为压力变送器,经过处理后,压力变送器输出的电压与液体压力大小呈线性比例关系,因此输出的电压和液体压力值相互对应,式(3-2)为液体压力与电压的关系式,等式右侧的
为液体的实际压力,K是比例系数、b是修正值,左侧的U是压力传感器的输出电压。
![]()
![]()
由前文可知,本系统中压力传感器的量程在0MPa-0.6Mpa之间,输出电压为DC0〜5V,将对应数值代入式(3-2)中有:
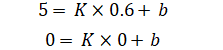
计算得到b=0,K=25/3。在不考虑动作延迟性的情况下,设定压力传感器传递函数为不变的常数,因此液体压力与电压信号的传递函数的表达形式为:
![]()
![]()
(3)在考虑传输动作延迟性的情况下,需要添加由于管道导致的信号延迟因素,表达形式如下:

综上所述,在理想传输条件下(不考虑动作延迟性的情况)的压力控制传递函数由下式表示:

3.1.2流量控制模型分析与构建
以喷雾机喷杆为安装载体,6组喷头沿喷杆长度方向均匀排布;为保证主控制器及高频电磁阀等的计算处理与响应动作时间,每组超声传感器的安装位置均靠前于所在支路的高频电磁阀,且两者连线平行于机具前进方向,如图3-2所示。根据超声传感器与喷头安装位置及施药作业过程,简化并获得单行施药作业几何关系图,如图3-3所示。
(a) 侧视图 (b) 俯视图
1.超声传感器 2.喷杆 3.喷头 4.苗株
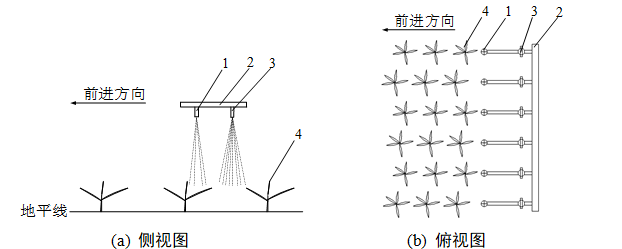
图3-2超声传感器与喷头安装示意图
Fig.3-2 Schematic diagram of ultrasonic sensor and nozzle installation
1.超声波测距传感器,2.喷头,3.地平线,4.苗株
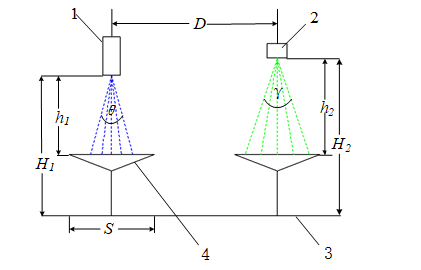
图3-3单行施药作业几何关系图
Fig.3-3 Geometric relationship diagram of single row spraying
当前主流研究通常以作业速度、对象有无和作物冠层大小等作为变量施药的参考因素,往往忽视作物高度(即作业物距)对施药效果的影响。本文通过分析几何关系(图3-3)发现:受喷雾角(
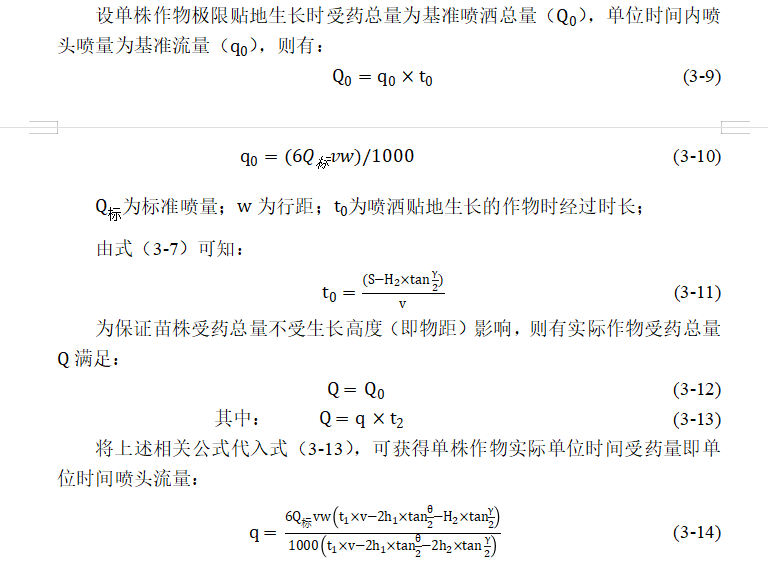
)影响,喷头与苗株冠层距离值(h2)越大,喷洒作业范围越大。即车速稳定的前提下,苗株冠层距离喷头越远,其受药时间越短,从而导致苗株受药量越少。为保证相同冠层面积的植株受药量一致,需增加喷头对远距离植株的单位时间喷药量。为此,计算并建立单位时间施药量、喷头喷药时长分别与物距的关系式:
作物沿前进方向的投影长度为:
![]()
![]()
为喷雾作业速度;
为超声传感器声波束角;
为超声检测当前苗株经过的时长。即当超声束角前端检测到植株冠层后端时开始计时,超声束角尾端离开作物冠层前端时结束计时,时长即为![]()
![]() 为超声检测到植株冠层距离。
为超声检测到植株冠层距离。
当喷头喷雾角后端到达苗株冠层后端时开启喷头,喷头喷雾角前端到达苗株冠层前端时关闭喷头,则喷洒作物经过的目标时长,即喷头实际喷药时长计算可得:

3.2系统压力控制算法设计与仿真
3.2.1系统控制算法优选
实现施药器械的变量控制及其监控的重要手段为进行有效科学的系统控制算法的设计。当前该领域的控制算法较多,主要有PID控制算法、模糊控制算法、滞环控制算法、基于数学模型控制法等。
(1)PID控制算法:隶属经典控制算法之一。玄子玉[54]为了对系统的喷量进行控制,通过PID控制算法对喷雾器的压力进行了调节。由于这篇文章对PID控制算法的控制过程未进行详细阐述,仅得出了喷雾量以及喷雾压力的探测结果误差,因此该方法需要进行更深入的探索。
(2)模糊控制算法:陈勇[55]在对树木等的喷药问题的研究中应用了模糊控制算法,然而未应用此方法研究喷药压力及喷药量的问题。张发军[56]在对靶标喷药的控制研究中提出了基于模糊控制规则,进行了较为细致的叙述,然而控制实验的结果以及一些参数的制定细节并未给出。邵陆寿[57]通过仿真模拟建立了根据病虫害级别及农作物密度的进水泵和进药泵的模糊控制喷雾系统,详细分析了算法对于该系统的控制作用,但缺少实验对正,仍需进一步研究。
(3)滞环控制算法:翟长远[58]为研究喷药量的控制,应用在稳定压力下可达到较高精度控制水平的滞环控制算法进行分析。由于其具有分段控制算法的实质,当电动球阀动作性能较差以及压力波动较大时,该算法对施药量控制的精准度将下降,因此该算法还有待优化。
(4)基于数学模型控制法:是一种根据拟合的实验数据建立数学模型,并通过数学模型进行精确控制的方法。史岩[59]建立了喷雾控制系统的准确数学模型并进行了模拟仿真分析,进一步将电流与施药量的关系确定。即使数学模型控制法具有较高的准确性,然而针对不同的复杂情况及各种施药条件,需要建立不同的数学模型,难度较大。
(5)PWM控制算法:即利用PWM信号得到不同占空比的PWM输出波形,通过控制电磁阀喷头改变喷药量大小。魏新华[60]等设计了一套PWM间歇喷雾式变量施药控制系统,通过控制PWM信号的频率和占空比来实现变量喷施。
在合理选择控制算法并进行施药机变量控制算法优化的理念上,本文对采用PID压力控制算法的系统进行了一系列的实验及模拟仿真研究;流量调节方式采用当前较为成熟的基于PWM波的流量控制方法,通过实时变更占空比,调节流量。
3.2.2压力PID控制算法设计
在这篇文章中所使用的是PID控制算法来控制药液的压力和剂量。 思路是:PLC采集药液压力信号,经过AD转换后转换为数字信号,然后通过算法通过PID运算获得数字控制量,再通过DA转换将控制量反馈给比例减压阀, 控制药液压力。其中PID控制器关系式为:
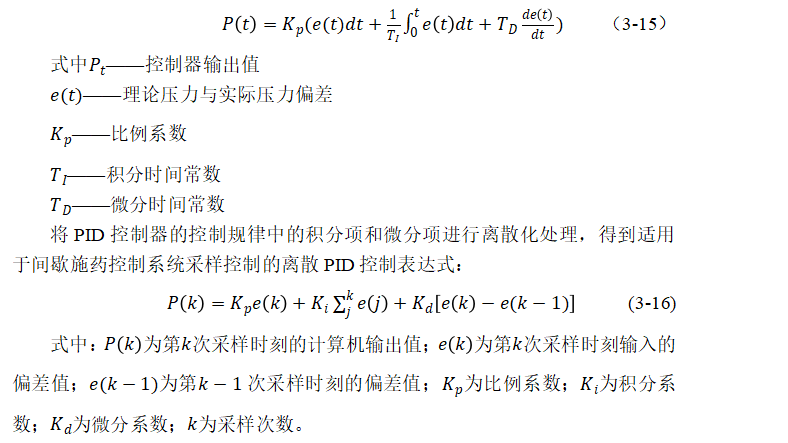
在实际应用过程中,由于各式各样的复杂因素,不可能将液体压力准确地调节到设定压力。 因此,根据系统中设定的误差要求,将药液压力的允许误差范围设置为AP,然后计算药液压力,如图3-2所示。 其中的详细的的软件实现的过程详见系统软件设计部分,本文仅从控制算法的角度描述药液压力的PID控制过程。

图3-4压力PID控制流程图
Fig.3-4 Flow Chart of PID Control on Pressure
3.2.3算法仿真及结果分析
在本文中为了测试该算法的压力控制效果,使用MATLAB2014a软件中的Simulink仿真系统来对该算法进行了分析。
根据图3-1所示的压力控制模型和过程控制理论,将系统延迟参数设置为0.01s,然后如图3-5所示建立压力PID控制仿真系统。
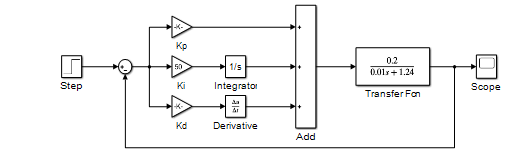
图3-5压力PID控制的仿真系统
Fig.3-5 Simulation System of Proportion Integral Derivative (PID) Control on Pressure
在仿真过程中,采用稳定边界法对三个参数的值进行优化,通过仿真接口的示波器观察系统的响应结果。在使用仿真后发现,当单位阶跃信号作为仿真输入信号时,当三个参数值分别为0.01、50、0.05时,控制响应效果比较好的是压力PID控制模型。响应曲线如图3-6所示。
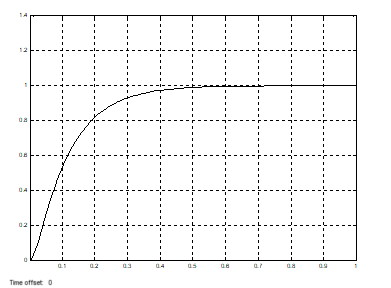
图3-6压力PID控制仿真曲线
Fig.3-6 Simulation Curves of PID Control on Pressure
从压力控制模型传递函数可以知道,压力控制系统属于一阶系统。从图3-6可以看出,在对PID控制算法实施压力控制时,压力控制系统对单位阶跃信号的响应时间约为0.5s。
3.3流量控制算法
本系统采用脉宽调制技术(PWM)来实现变量施药。通过改变控制驱动线圈的信号的占比空间来达到目的,即为PWM。处于PWM模式的情况下,开关周期是永恒不变的,占空比由导通时间决定,平均输出流量与导通时间成正比。在脉宽调制技术中,喷嘴的平均流量由高速电磁阀控制,即,

3.4本章小结
本章主要设计和仿真了系统的压力和流量控制模型的建立和控制算法。主要结论如下:
(1)分析并建立了压力PID控制模型。设计并仿真了压力PID控制算法。仿真结果表明,在单位阶跃信号输入下,压力PID控制系统的响应时间为0.3s。
(2)根据几何关系分析建立了流量控制模型,通过分析对比不同控制算法,确定采用PWM控制方法进行调节流量。
第四章 系统软件设计
4.1 PLC程序设计原理
4.1.1 PLC工作原理
在PLC开始运行之后,PLC的工作过程一般分为三个阶段,即输入采样、用户程序执行和输出刷新。以上三个阶段的扫描周期依次完成。在整个操作过程中,PLC CPU的扫描速度在以上三个阶段反复执行。
(1)输入采样阶段
在一开始的采样阶段,PLC通过扫描依次读取所有的输入状态和数据,并将其放入I / O图像区域中存储的相应单元中;在输入采样完成之后,就进入用户程序执行和输出刷新阶段。当输入是脉冲信号时,信号宽度必须大于一个扫描周期,以确保在任何情况下都能读取输入信号。
(2)用户程序执行阶段
在用户程序执行阶段,PLC通常以自顶向下的顺序扫描用户程序(梯形图)。扫描梯形图时,总是扫描替代由左派控制电路、执行逻辑运算和控制电路由一系列的订单,然后根据逻辑运算的结果,刷新系统的RAM(工作记忆的区域)在相应位置的逻辑线圈状态;或者决定是否执行梯形图中规定的特殊功能指令;或刷新I / O图像区域中输出线圈的相应位的状态。
(3)输出刷新阶段
在这个阶段,CPU根据I / O图像区域对应的数据和状态刷新所有的输出锁存器电路,然后通过输出电路驱动相应的外部设置。
4.1.2 PLC编程语言
Cx-programmer软件具有从2001 cx-programmer2.0到现在的cx-programmer9.6的多个版本,具有高版本兼容性和低版本功能。它支持C,CV / CVM1,CS1,CJ1,CPIH,CPIL和其他OMRON全系列PLC。 Cx-programmer具有强大的编程,调试和监视功能以及完善的维护功能,使程序开发和系统维护更加轻松快捷[61]。
(1)梯形图(LAD)
梯形图由一个线圈,一个触点和一个以方框表示的指令框组成。线圈通常代表逻辑运算的结果,并用于控制内部标志位,外部指示灯和交流接触器。触点表示逻辑输入条件,例如外部开关,按钮和内部条件。该命令框用于表示其他指令,例如计数器,计时器或数学运算。 LAD直接来自继电器控制原理的扩展图。在分析梯形图的逻辑关系时,为了借用继电器电路图的分析方法,可以想像垂直“电源线”左右两侧之间的梯形图具有负的直流电源电压,当图4-1 I0.00与I0.01同时连接时,左侧为右侧,则有一个假设的“能量流”(功率流)流经Q0.00线圈,可以流可以从左侧流向对。

图4-1梯形图示例
Fig. 4-1 Example of trapezoid diagram
(2)语句表(STL)
CPIH系列PLC将称为语句列表,它类似于微型计算机的汇编语言,在文本语言中,将多个语句分成一个程序段。例如图4-2:
图4-2语句表
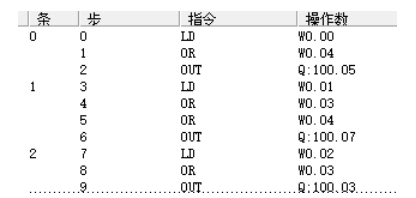
Fig 4-2 Statement table
4.1.3 PLC控制系统的一般步骤
PLC应用系统设计和调试的主要步骤如图4-3所示:
(1)充分的进行理解和严谨的解析受控对象的控制要求和控制过程需要的条件。
(2)受控对象是一般情况下指受控的电子器材,机械设施,进行生产的过程或者生产线。
(3)控制要求主要是指基本的控制方式,自动工作周期的组成,必要的保护和互锁等。对于更复杂的控制系统,控制任务也可以分为独立的部分。

图4-3 控制系统一般设计步骤
Fig. 4-3 General design steps of control system
(2)确定I / O设备
根据PLC控制系统对被控对象的功能要求,确定系统所需的输入和输出设备。常用的输入设备包括行程开关、选择开关、按钮和传感器。常用的输出设备包括灯、接触器、继电器和电磁阀。
(3)选择合适的PLC类型
根据确定的用户I / O设备,计算所需的输入输出信号点,选择合适的PLC类型,包括型号选择、I / O模块选择、电源模块选择、容量选择。
(4)分配I / O点
分配PLC输入输出点,编制输入输出分配表或编制输入端接线图。PLC程序设计完成后,可以同时进行工作站或控制柜的设计和现场施工。
(5)应用系统梯形图程序设计
根据工作功能图或状态流程图设计梯形图。这一步是整个应用系统设计的核心工作。要设计一个好的梯形图,你必须熟悉控制要求,并有一些电气设计的实际经验。
(6)将程序输入PLC
当使用简单的程序设计器将程序输入PLC时,最好将梯形图输入到指令助记符中进行输入。当使用PLC的辅助编程软件在计算机上编程时,可通过上位机和下位机的连接电缆将程序下载到PLC上。
(7)软件测试
程序输入PLC后,需要先进行测试。因为在编程的过程中,会有遗漏。因此,在PLC与现场设备连接之前,有必要进行软件测试,消除程序中的错误,为整个调试打下良好的基础,缩短整个调试周期。
(8)应用系统整体调试
完成PLC软硬件设计、控制柜及现场施工后,对整个系统进行在线调试。如果控制程序中有更多的步骤,您可以在部分中调试,然后连接到主程序。
4.2 间歇施药系统程序设计
4.2.1软件程序流程规划
根据施药作业要求,规划软件程序流程,如图4-4所示,系统启动并经初始化后,首先输入系统目标压力、标准喷量等工作参数。随后,通过超声波传感器探测目标苗株,采集其生长高度即物距信息,内置间歇施药控制算法根据物距值计算喷药流量,并通过高频电磁阀完成变量喷药动作。与此同时,系统实时监测实际管路压力,基于PID算法控制并调整比例减压阀开度,实现闭环稳压。
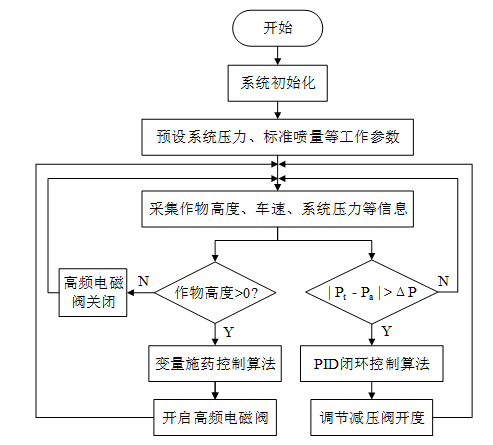
图4-4 控制系统软件流程图
Fig.4-4 Flow chart of control system
项目设计的主要任务是编写逻辑程序。 首先,程序员应阐明控制过程的概念。
PLC编程软件支持模块化编程。 根据系统中不同的控制功能,它可以分为几个子程序。 可以将同一程序段的功能写入一个子程序,该子程序可以重复调用。 系统中的OB1(MAIN)是一个MAIN程序。 需要强调的是,必须在MAIN程序中调用该子例程,否则PLC将在整个扫描周期中跳过被调用的UN子例程,从而影响控制过程。 间歇应用控制系统主要包括压力和流量计的采集程序,电磁阀的启停控制和比例减压阀的开度控制。 系统的整个块组成如图4-5所示。
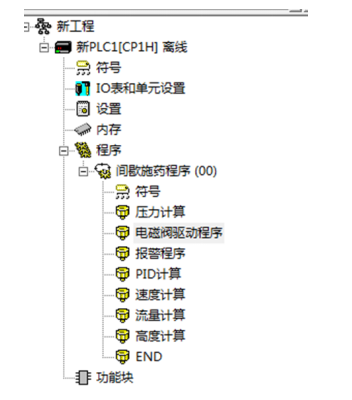
图4-5系统程序块
Fig. 4-5 system program block
4.2.2模拟量采集程序
将各传感器对应通道采集到的数据,存储到PLC内部寄存器中,然后根据要求再对其进行计算处理等。系统中传感器的输出信号均为模拟量,通过AD转换模块转换为数字量,PLC对检测的数字量进行相应的运算处理,得出相应检测值。
(1)速度检测

其中
为车轮直径,m
为速度当前测量值,m/s;
为速度传感器最大值,r/min
速度传感器检测最小值,r/min
(2)流量检测

为流量当前测量值,L/mim
为流量检测传感器最大值,L/min
为流量传感器检测最小值,L/min
(3) 压力检测

为压力当前测量值,Mpa
为压力传感器检测最大值,Mpa
为压力传感器检测最小值,Mpa
(4)作物高度测量
对行测距传感器检测值 ,则:

其中
为传感器测量最大值,cm
为传感器测量最小值,cm
为高度当前测量值,cm
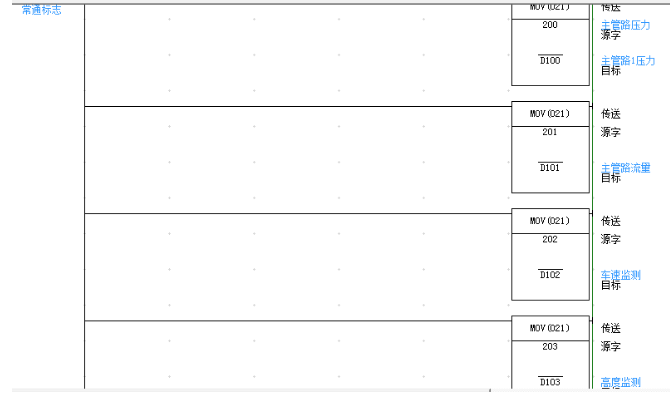
图4-6模拟量采集部分程序
Fig. 4-6 Part of the program of analog quantity collection
4.2.3 报警程序
报警程序设计,根据试验中采集到的主管路压力,与事先设定的压力阈值进行比较,当实时压力大于压力阈值时,系统报警。首先系统初始化,然后根据实际要求设置喷雾参数,参数设置完毕,按下启动键启动隔膜泵,同时启动监测系统,PLC对传感器采集数据处理计算实际喷施信息;实时检测阀后(减压阀)压力与阈值对比判断,当阀后(减压阀)压力超过阈值时,系统报警,停止作业。
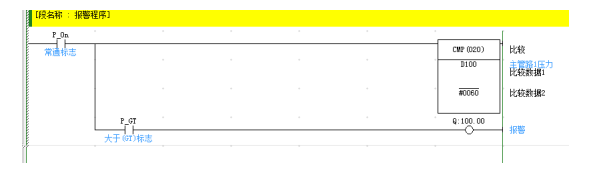
图4-7报警程序
Fig.4-7 Alarm program
4.2.4 压力PID计算
根据第三章中的PID控制算法,设计PLC程序,由仿真中得到的
的值,进行PID计算。
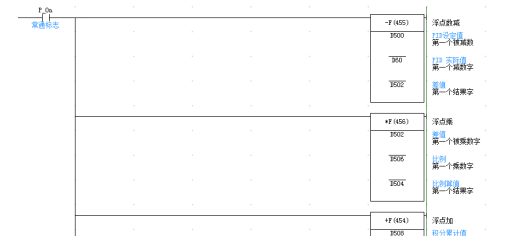
图4-8PID计算
Fig. 4-8 the PID calculation
4.2.5 流量控制算法
本系统选用PWM流量控制算法,通过控制电磁阀的开启时间,即整个周期的占空比,来实现变量施药。因此软件主要是利用定时器构建不同频率不同占空比的脉冲信号控制电磁阀来改变单个喷头的瞬时流量。控制程序如图4-9所示。
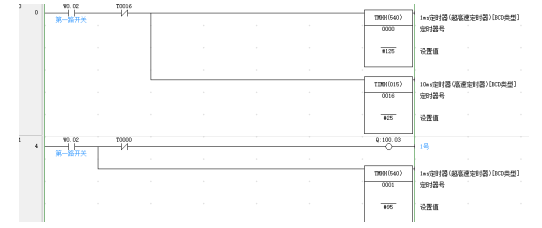
图4-9电磁阀PWM控制程序
Fig 4-9 Electromagnetic valve PWM control program
4.3基于LabVIEW的上位机软件设计
本节主要包括以下三方面内容:应用LabVIEW编制人机界面,PLC与LabVIEW通讯;在线调试。
4.3.1应用LabVIEW编制人机界面
(1)新建一个VI
从File菜单中选择New打开新的VI,出现VI的前面板和程序框图,如图4-13。
图4-13新建VI的前面板程序框图
Fig. 4-13 New VI front panel block diagram
(2)创建控件和指示器
根据对控制系统分析,人机界面应有开始按钮、停止按钮,物距、压力和流量显示值,以及速度、压力和流量随时间变化的曲线图,超压报警使用红色指示灯显示。如图4-14所示。

图4-14设计人机界面前面板
Fig. 4-14 Design the front panel of man-machine interface
(3)编辑与操作
该程序的设计思想是将收集的主管压力与预设压力阈值进行比较。当实时压力大于压力阈值时,系统将发出超压警报。如果实时压力小于设定值,则系统指示灯点亮。
(4)连接
每个指示器或控件都有其自己的接线端,该接线端已正确连接,以便在断线时以虚线显示程序图。
(5)布局
面板上的显示工具及其相应的显示值与方框图一起装箱,以使界面显得更加井井有条。
(6)操作
连接完全正确后,继续运行该程序。
(7)使用LabVIEW的优势
与使用实际仪器相比,使用LabVIEW显示仪器,图形和数据具有很大的优势。 LabVIEW界面上的仪器可以任意调整大小,范围和数量。当使用实用工具解决这些问题时,很明显它不像应用程序软件那样简单。必须更换所需的仪器,从而降低经济性,安全性和可靠性。目前,许多行业都在使用LabVIEW进行数据分析和仪器显示。
4.3.2PLC与LabVIEW通讯
上位机与PLC之间的交互在事实上是电脑与PLC通信模块HostLink之间交换命令和响应的过程。上位机具有初始传送优先权,所有通讯均由上位机启动,不需要PLC编写通信程序。
(3)LabVIEW与PLC通讯的实现
1)PLC上位机链接设置
使用RS232C端口时,应将DM6645的12〜15位设置为0,将PLC的节点号设置为DM6648的00〜07位。 使用了OMRONCP1HPLC的默认设置。 换句话说,当CPU的DIP开关J脚设为OFF时,PLC与上位机之间的通讯采用以下参数:起始位:1位; 数据长度:7位; 停止位:2位; 奇偶校验: 波特率:9600b / s。
2)LabVIEW中串口通讯的步骤
LabVIEW具有5个串行通信节点,包括初始化端口(Serial Port Init。Vi),串行端口写操作。 Vi),串行端口读取。 Vi),检测串行端口的字节。 在LabVIEW程序中,可以通过以下步骤实现与PLC的通讯:
(1)初始化串行端口并且初始化通信双方的串行端口号,波特率,数据位,停止位,奇偶校验等;
(2)以PLC命令帧的格式打包待发送的数据,包括计算帧校验序列FCS;
(3)写端口将整个命令帧发送到串口;
(4)延迟等待PLC的响应帧到达串口;
(5)读取串口并读取PLC的响应帧;
(6)解包读取读取的响应帧并读取对应的数据。
3)LabVIEW中串口通讯的实现
(1) 初始化串行端口。根据PLC串行口通信的要求,通过串行口初始化将端口号设置为0。Vi节点,即设置上位机的串行口COM1与PLC通信。波特率设置为9600b/s;数据位为7位;停止位设置为2位;奇偶校验设置为2,即数据帧奇偶校验。
(2) 计算PLC数据帧的FCS并打包数据。
(3) 发送、接收和解压缩串行端口
数据的发送和接收主要由串行口写入和串行口读取节点来实现。串行口写入完成后,在读取前应将串行口延时一段时间(如延时250毫秒),以保证串行口的正常通信。解包程序与打包程序类似,其过程是相反的。
4.3.3在线调试
启动PLC以及电源开关,等待PLC开始运行,在LabVIEW界面,点击连续操作界面,开始运行程序。调整界面压力设定值为0.2mpa,并调节比例减压阀开度,指示灯正确闪烁,系统运行正常,达到了预期的目的。
4.4本章小结
本章主要介绍了间歇施药控制系统的软件设计,包括上位机软件设计和PLC软件设计。上位机选择LabVIEW进行程序界面设计,软件设计包括作物信息采集模块、界面模块与通讯模块。PLC程序设计,软件设计主要包括PLC处理主程序、间歇控制子程序、监测子程序,通讯子程序、报警子程序。
第五章 试验及结果分析
5.1试验目的及内容
本章主要实现了对系统硬件和软件的调试和验证。主要包括系统调试验证和控制测试。其中,系统调试测试包括上位机和下位机的系统调试;控制测试主要是对控制算法和整个系统性能的测试,包括控制算法参数调整实验和系统整体控制性能测试两个方面。
5.1.1试验目的
根据本研究设计的各功能模块的软硬件调试,测试其是否能正常工作,满足设计的功能要求;同时,系统的整体性能,如系统的可靠性和可行性,当协调系统的各个模块进行测试。
5.1.2试验内容
针对间歇喷雾的喷雾要求,从而为间歇喷施的进一步研究奠定基础,为实际应用提供理论支持,结合实际试验条件,试验内容主要有间歇喷施系统调试、压力PID控制精度试验、流量控制精度试验验证等。
5.1.3试验装置搭建
根据系统设计原理,设计搭建了玉米苗期间歇施药试验台,为系统验证试验提供了一个平台,便于验证系统可行性。

图5-1试验装置
Fig.5-1Test device
5.2系统调试
(1)泵的工况测定与验证
液压泵的工况实验主要是测试被测泵的流量性能参数随压力的变化规律。 将泵的工作压力设置为无负载、0.1Mpa、0.2Mpa、0.3Mpa、0.4MPa等5种工况下运行,测试其流量特性,检验是否为恒流泵。
(2)喷雾系统回路测试
系统回路的通断是喷雾系统的重要保证,防止因管路堵塞而导致隔膜泵失效和安全事故。因此在试验前必须对喷雾系统进行回路测试。回路测试采取分段逐步测试,系统压力控制在0.1Mpa以下。各段区稳定运行2min,再试验其他段区,直到喷头有水喷出。
(3)喷雾系统密封性试验
密封性实验是保证各液压部件和接头处不滴漏,从而保证系统的正常运行。将系统压力调至0.1Mpa,将各回路打开,保压2min,检查系统各处是否有滴漏。系统接头无滴漏后,检查各开关阀是否可以完全密闭及各功能阀是否有漏水现象。
(4)喷雾系统稳定性测试
喷头的流量和喷雾特性对喷雾压力比较敏感,因此,系统压力的稳定性是喷雾系统的重要特性,为后续的研究提供可靠的保障。将喷雾压力分别调整为0.2Mpa、0.3Mpa、0.4MPa,在三种工况下,喷雾2min,监测各压力表和传感器数据,检查主管路压力波动是否小于10%,喷雾压力波动值是否小于5%,否则判定不合格。
表5-1压力波动表
Tab.5-1 Pressure fluctuation table
| 序号 | 压力表数值/Mpa | 传感器数值/Mpa | 相对误差/% |
| 1 | 0.20 | 0.198 | 1.0 |
| 2 | 0.30 | 0.313 | 4.3 |
| 3 | 0.40 | 0.390 | 2.5 |
| 4 | 0.50 | 0.489 | 2.2 |
由表5-1可知,压力波动相对误差不超过4.3%,波动值在5%以内。因此可以得出该系统压力稳定,喷雾系统符合要求。
为保证喷雾系统的超压密封性和安全性,防止由于气穴、气蚀和压力的脉动性产生的压力冲击和操作失误而导致压力过高引起的不良事故发生。因此需在正式试验前,验证系统的耐压性能。
5.3速度信息监测与校正
对于速度测试和校正测试主要的目的是为了测试系统对喷涂机速度的数据采集是否存在误差。 系统所能获取到的速度的采集值是通过监视系统中速度传感器收集的; 实际速度借助实验室测速仪进行测试。 同时,由于轨道喷涂机工作过程中的打滑现象,在测试过程中校正速度测量值,并比较速度校正前后的测量结果。 测试结果示于表5-2。
表5-2速度检测校正试验结果
Tab.5-2 speed detection and correction test results
| 校正前 | 校正后 | ||||
| 实际速度/
m/s | 测量速度/
m/s | 相对误差/
% | 实际速度/
m/s | 测量速度/
m/s | 相对误差/
% |
| 0.389 | 0.289 | 3.3 | 0.389 | 0.370 | 1.30 |
| 0.503 | 0.489 | 4.1 | 0.503 | 0.491 | 1.20 |
| 1.020 | 0.976 | 4.2 | 1.020 | 1.00 | 0.98 |
| 1.203 | 1.011 | 3.8 | 1.203 | 1.197 | 2.10 |
| 1.412 | 1.357 | 3.7 | 1.412 | 1.395 | 2.15 |
| 1.601 | 1.502 | 4.8 | 1.601 | 1.597 | 0.37 |
由表5-2可知,系统校正前后对对速度测量的相对误差平均值分别为3.4%和2.15%;其中校正前的相对误差最大值与最小值分别为4.8%和3.3%;校正后的相对误差最大值为2.15%。可见,校正后系统中速度采集信息,误差明显减小。
5.4压力PID控制精度试验
作为系统中最重要的执行器,比例减压阀的调压性能会影响整个系统的控制性能和精度。 为了确定在减压过程中减压阀的开度和喷雾压力之间的实际关系,需要对喷雾系统的压力调节特性进行实验测试。
在不同的工作负荷下,系统的压力调节特性是不同的。 因此,实验是在不同的压力下进行的。 当比例减压阀的前压力为0.5MPa时,进行实验,实验采用1组1个喷头为工作负载,水代替药液进行实验。
调整系统阀后压力,分别设置目标值为0.2MPa、0.3MPa、0.4MPa,随机设置喷头高频电磁阀占空比,模拟系统扰动,通过压力传感器随机采集不同目标压力值下的5组实际压力值,计算系统压力闭环控制相对误差。试验结果如表5-3所示。
表5-3压力PID控制精度表
Tab.5-3 Pressure PID control precision table
| 试验序号 | 目标压力/Mpa | 实际压力
/Mpa | 相对误差/% | |
| 1 | 0.2 | 0.1928 | -3.60 | |
| 2 | 0.1906 | -4.71 | ||
| 3 | 0.1915 | -4.25 | ||
| 4 | 0.2043 | 2.15 | ||
| 5 | 0.1937 | 3.15 | ||
| 6 | 0.3 | 0.3012 | 0.40 | |
| 7 | 0.2956 | -1.47 | ||
| 8 | 0.2927 | -2.43 | ||
| 9 | 0.3098 | 3.27 | ||
| 10 | 0.3076 | 2.53 | ||
| 11 | 0.4 | 0.3902 | -2.45 | |
| 12 | 0.4032 | 0.80 | ||
| 13 | 0.4065 | 1.63 | ||
| 14 | 0.3857 | -3.58 | ||
| 15 | 0.4028 | 0.70 | ||
由表5-3可知,系统具有较好的压力闭环控制效果,系统目标压力与实际压力误差在4.71%以内,满足作业需求。
5.5流量控制实验
5.5.1PWM控制流量试验
喷雾压力、PWM信号频率和占空比、回流高速电磁阀提前角对喷头喷雾动态流量均有影响。所以采用单因素实验,分析不同工况组合下,喷头喷雾流量动态特性的影响因素。
在每个压力下,PWM频率依次设置为1、2、3、4、5 Hz; 在每种压力频率工作条件组合下,步长为10%,占空比范围为10%-100%。 电磁阀和喷嘴组合的占空比连续变化1,其他电磁阀和喷嘴组合的占空比保持在100%。 用自来水代替药水; 履带喷涂车是固定的; 调整被测喷嘴的安装角度和除雾装置的位置,使喷嘴垂直于除雾装置的水平面,雾量收集器的几何中心位于喷头与雾量收集装置的水平面投影上。调整喷头与地面高度保持为0.3m,并对雾量收集装置称初始重量并编号。
表5-40.2Mpa喷雾压力下1号喷头的喷雾流量
Tab.5-4 Spray flow rate of no1 nozzle under 0.2mpa spray pressure
| 占空比/% | 控制信号频率/Hz | ||||
| 1 | 2 | 3 | 4 | 5 | |
| 10 | 0.079 | 0.073 | 0.075 | 0.078 | 0.067 |
| 20 | 0.163 | 0.156 | 0.161 | 0.155 | 0.153 |
| 30 | 0.225 | 0.222 | 0.233 | 0.229 | 0.227 |
| 40 | 0.315 | 0.313 | 0.319 | 0.311 | 0.309 |
| 50 | 0.395 | 0.375 | 0.380 | 0.372 | 0.377 |
| 60 | 0.435 | 0.466 | 0.461 | 0.449 | 0.452 |
| 70 | 0.552 | 0.536 | 0.545 | 0.541 | 0.539 |
| 80 | 0.623 | 0.599 | 0.615 | 0.610 | 0.603 |
| 90 | 0.670 | 0.665 | 0.683 | 0.663 | 0.659 |
| 100 | 0.751 | 0.746 | 0.748 | 0.752 | 0.744 |
表5-50.3Mpa喷雾压力下1号喷头的流量
Tab.5-5 Fow rate of no1 nozzle under 0.3Mpa spray pressure
| 占空比/% | 控制信号频率/Hz | ||||
| 1 | 2 | 3 | 4 | 5 | |
| 10 | 0.118 | 0.117 | 0.113 | ||
| 20 | 0.243 | 0.237 | 0.239 | 0.231 | 0.229 |
| 30 | 0.334 | 0.335 | 0.347 | 0.332 | 0.336 |
| 40 | 0.469 | 0.471 | 0.473 | 0.459 | 0.447 |
| 50 | 0.578 | 0.546 | 0.565 | 0.553 | 0.544 |
| 60 | 0.673 | 0.693 | 0.689 | 0.668 | 0.673 |
| 70 | 0.813 | 0.797 | 0.812 | 0.805 | 0.794 |
| 80 | 0.927 | 0.891 | 0.915 | 0.907 | 0.897 |
| 90 | 0.996 | 0.982 | 1.020 | 0.986 | 0.981 |
| 100 | 1.116 | 1.109 | 1.113 | 1.118 | 1.106 |
表5-60.4Mpa喷雾压力下1号喷头的流量
Tab.5-6 Flow rate of no1 nozzle under the spray pressure of 0.4Mpa
| 占空比/% | 控制信号频率/Hz | ||||
| 1 | 2 | 3 | 4 | 5 | |
| 10 | 0.157 | 0.154 | 0.149 | ||
| 20 | 0.336 | 0.348 | 0.334 | 0.332 | |
| 30 | 0.493 | 0.509 | 0.512 | 0.511 | 0.490 |
| 40 | 0.645 | 0.639 | 0.641 | 0.646 | 0.637 |
| 50 | 0.797 | 0.813 | 0.815 | 0.808 | 0.803 |
| 60 | 0.975 | 0.993 | 0.998 | 0.983 | 0.987 |
| 70 | 1.148 | 1.145 | 1.158 | 1.143 | 1.139 |
| 80 | 1.325 | 1.321 | 1.322 | 1.326 | 1.319 |
| 90 | 1.442 | 1.435 | 1.438 | 1.429 | 1.431 |
| 100 | 1.565 | 1.561 | 1.573 | 1.559 | 1.560 |
通过结果发现,当喷雾压力较大时,PWM控制信号频率大于3Hz,占空比小于20%,电磁阀不能正常响应,喷雾效果失真,不能正常进行操作,如上表中的空白所示。
从上表可以看出,喷涂压力对喷涂效果有很大的影响。 但其他的工作前提不改变的时候,喷嘴的喷雾流量会因为压力的增大而增大。 PWM控制信号频率对喷雾量的影响很小,在相同压力和相同占空比下,喷雾压力流量基本相同。 PWM信号的占空比对喷雾器的数量有很大的影响,喷雾流量大致与PWM控制信号的占空比成正比。
5.5.2流量控制精度试验
取120株玉米苗,划分为4组,每组30株,通过垫高、修剪等方式,使各组苗高度保持一致且依次为31cm(1号组)、23cm(2号组)、15cm(3号组)、7cm(4号组)。参考实际种植模式,初定株距30cm,行距50cm。以自来水代替药液。
单次试验需连续完成1组即30株苗的喷施作业,每组苗共进行5次试验。通过流量传感器采集喷洒作物时的瞬时流量,取单次试验的平均值,将其与公式(3-14)得到的理论流量值进行对比,计算变量喷雾控制相对误差。试验结果如表5-7所示。
表5-7喷施流量控制精度表
Tab.5-7 Variable spraying control precision
| 组别 | 单喷头理论流量
L/min | 单喷头瞬时流量
L/min | 相对误差/% |
| 1号 | 0.354 | 0.348 | 1.72 |
| 0.351 | 0.87 | ||
| 0.360 | -1.74 | ||
| 0.339 | 4.24 | ||
| 0.345 | 3.95 | ||
| 2号 | 0.498 | 0.491 | 1.41 |
| 0.497 | 0.20 | ||
| 0.489 | 1.81 | ||
| 0.509 | -2.21 | ||
| 0.522 | -2.81 | ||
| 3号 | 0.539 | 0.557 | -3.34 |
| 0.538 | 0.19 | ||
| 0.531 | 1.48 | ||
| 0.509 | 5.57 | ||
| 0.548 | 1.67 | ||
| 4号 | 0.643 | 0.633 | 1.56 |
| 0.656 | -2.02 | ||
| 0.637 | 0.93 | ||
| 0.611 | 4.98 | ||
| 0.650 | 1.09 |
由表5-7可知,系统具有较好的流量控制精度,相对误差在
5.57%以内,满足作业要求。
5.6本章小结
在本章节中主要阐述了间歇性喷雾控制系统的实验与分析,包括如何搭建的实验平台的搭建、如何设计的实验和分析结果。试验的设计主要包括控制效果的检测以及喷雾系统的性能的检测。控制效果实验主要包括速度是否正常、压力是否正常以及流量是否正常。喷雾系统的测试包括是否能正确调节压力和是否能良好控制流量。最后得出理想的实验结果。通过对实验结果的合理分析,验证了间歇应用方案结构合理,控制可靠,满足设计精度要求。
第六章 结论与展望
6.1结论
智能植物保护的重要组成部分之一是间歇喷雾技术。它对于发展适合中国国情的可持续农业具有重要的理论意义和实践价值。目前,农药喷洒中常用的喷雾器主要适用于连续作业甚至均匀作业,对病虫害的防治效果更好。但是,在操作过程中,由于缺乏对应用对象和用途的分析,存在农药有效利用率低,农产品中农药残留过多,环境污染,农作物中毒,操作人员中毒等问题。造成的。针对以上问题,提出了一种玉米喷药间歇喷洒控制系统,即比例减压阀,电磁阀的启闭时间和基于PLC控制的传感器检测技术相结合。根据喷施目标的存在和喷施速度的变化,采用间歇喷施来解决较精确的喷施农作物。尤其是自动和精确喷洒农药。在本文的研究工作的基础上,主要内容和结论归纳如下:
1.实现了间歇喷涂控制系统的总体设计,包括间歇喷涂控制系统的设计标准,涉及到的目标,了解设计原理,实验的方案和特色。多次根据现有实验场景的不同对实验结果数据进行比较,改进了超声波传感器方便检测实验目标。
2.设计了间歇喷涂控制系统的硬件,其中设计了液压回路的结构和间歇喷涂控制系统的电路结构。和喷雾单元组成,硬件电路以PLC为核心,融合了喷雾控制、超声检测、电磁阀驱动、报警指示等多组模块。
3、完成了间歇施药喷雾控制系统软件设计,根据施药作业软件控制流程,设计了基于LabVIEW的上位机程序界面,包括模拟量采集、主界面和通讯等模块;开发了PLC处理主程序、模拟量计算、PID计算和报警指示等程序,实现间歇施药软件控制。
4、完成间歇施药喷雾控制系统实验与分析,包括试验平台的搭建和试验设计与结果分析。试验设计完成了喷雾系统性能测试和压力、流量控制试验。最终得出结论,间歇施药控制系统性能良好,流量控制精度误差在±5.57%以内,压力闭环控制相对误差在±4.71%以内,上下位机工作状态良好,各个模块工作正常。同时,在喷雾系统性能测试实验中,得出了喷雾压力、流量与占空比之间的关系,间歇喷雾方案结构合理,控制可靠,满足了设计精度要求。
6.2展望
因为时间问题,系统依然会存在一些需要改进的地方,需要进一步的进行研究和开发。主要存在的问题有如下几条:
1、间歇应用的喷雾控制部分需要进一步的研究和改进,基于超声波测距传感器的作物采集需要进一步完善;
2、喷雾机架利用电动推杆对喷杆进行上下位置的调节,本控制系统并没有探究喷杆高度的影响,今后的研究应该研究喷杆高度对喷雾均匀性的影响;
3、同时,应考虑间歇雾化的雾化特性。
参考文献
[1] 于刚,高志建,吕宁. 新疆兵团青贮玉米生产现状及覆膜滴灌栽培技术研究[J]. 新疆农垦科技, 2019,42(05):3-6.
[2] 中国农机工业协会精准农业技术装备分会吴才聪秘书长在第十届中国卫星导航年会上的报告摘要[J]. 农业工程技术, 2019,39(15):19-21.
[3] 李海龙. 玉米苗期病害防治措施[J].农民致富之友,2018(24):38
[4] 潘兴鲁,董丰收,刘新刚,等. 中国农药七十年发展与应用回顾[J]. 现代农药, 2020,19(01):1-5.
[5] 邱韶峰,魏秀军,宋鹏行. 植保机械两种变量施药技术对比分析[J].农机质量与监督, 2018(09):21+16.
[5] 何雄奎. 植保精准施药技术装备[J].农业工程技术,2017,37(30):22-26.
[6] 毕雅萱,赵帅,雷晓辉. 变量施药技术大盘点:哪项技术最精准?[J].中国农村科技,2016(08):68-71.
[7] Minneapolis,Minnesota. Proceeding of the 3rd International Conference: Precision Agriculture[J]. USA,1996,6:23-25.
[8] Estey, Rplph H.Canadian. Use of Aircraft for Plant Protection[J]. Phytoprotection, 2004,85(1): 7-12.
[9] Giles. D.K, Klassen P,Franz J.A,etal. Smart sprayer technology provides environmentaland economic benefits in California orchards[J].California Agriculture,2011,65(2):85-89 .
[10] Gerhards R, Sokefeld M, Timmermann C, et al. Site-specific weed control in maize,sugar beet, winterwheatandwinterbarley[J].PrecisionAgriculture,2002,3(1):25-35.23(11):148-150.
[11] Dammer K H,Wartenberg G.Sensor-based weed detection and application of variableherbicide rates in real time[J]. Crop Protection, 2007, 26(3): 270-277.
[12] Giles.D.K, Henderson.G.W, Funk.K.Digital control of flow rate and spray droplet sizefrom agriculture nozzles for precision chemical application[C]. Precision Agriculture Proc.3rdConference, 1996, 729-738.
[13] A Escolid, J R Rosell-Polo, S Planas, et al. Variable rate sprayer. Part1-Orchard prototype:Design, implementation and validation[J].Computers and Electronics in Agriculture, 2003,95:122-135.
[14] Qamar Uz Zamana,Travis J Esau,Arnold w Sc;humann, et al. Peroival, Young Ki Chang, Scott M. Read, Aitazaz A Farooque. Development of prototype automated variable rate sprayer for realtime spot-application of agroc;hemic;als in wild blueberry fields [J]. Computers and Electronics in Agriculture,2011,76:175-18
[15] 王蒙,谢峰,张宏文,王磊,等. 我国植保喷雾装置发展现状[J].农业工程,2019,9(12):4-7.
[16] 何雄奎. 中国植保机械与施药技术研究进展[J].农药学学报,2019,21(Z1):921-930.
[17] 张波,翟长远,李瀚哲,等. 精准施药技术与装备发展现状分析[J].农机化研究,2016,38(04):1-5+28.
[18] 翟长远,朱瑞祥,张佐经,等. 精准施药技术现状分析[J].农机化研究,2010,32(05):9-12.
[19] Giles D.K,Klassen P,Franz J.A,et al.Smart sprayer technology provides environmentaland economic benefits in California orchards[J]. California Agriculture,2011,65(2):85-89 .
[20] 翟长远. 果园靶标在线探测方法及风送变量喷雾技术研究[D].西北农林科技大学,2012.
[21] 李为. 果园对靶施药控制系统设计[D].西北农林科技大学,2014.
[22] 许绩彤. 果园实时混药风送式变量喷雾系统研制[D].华南农业大学,2016.
[23] 李传友. 矮化密植果园喷雾机选型试验研究[J].农机化研究,2016,38(01):201-206.
[24] 顾家冰,丁为民,邱威,孙诚达. 果园变量施药机械及施药技术研究现状与趋势[J].果树学报,2014,31(06):1154-1157.
[25] 郭俊杰. 果园精准施药机控制系统设计[D].西北农林科技大学,2013.
[26] 蔡吉晨. 基于二维激光雷达的果树在线探测方法及对靶变量喷药技术研究[D].中国农业大学,2018.
[27] 李龙龙,何雄奎,宋坚利,等. 基于高频电磁阀的脉宽调制变量喷头喷雾特性[J].农业工程学报, 2016, 32(1): 97-103.
[28] 刁智华,赵明珍,宋寅卯,等. 基于机器视觉的玉米精准施药系统作物行识别算法及系统实现[J].农业工程学报,2015,31(07):47-52.
[29] 陈勇,郑加强. 精确施药可变量喷雾控制系统的研究[J].农业工程学报,2005,21(5): 69-72.
[30] 王靖. 基于机器视觉的喷药机田间自行走控制研究[D].重庆:西南大学,2016.
[31] 刘雪美,李扬,李明,等. 喷杆喷雾机精确对靶施药系统设计与试验[J].农业机械学报,2016, 47(3): 37-44.
[32] HongY.jeon, Heping Zhu, Richard Derksen, Edal Ozkan, Charles Krause. Evaluation of ultrasonic sensor for variable-rate spray applications[J]. Computer and Electronics in Agriculture, 2011, 75(2011):213-221.
[33] Qamar-uz-Zaman, M. Salyani. Effects of foliage density and ground speed on ultrasonic measurement of citrus tree volume.[J]. Applied Engineering in Agriculture, 2004, 20(2): 173-178.
[34] 许林云,张昊天,张海锋,等. 果园喷雾机自动对靶喷雾控制系统研制与试验[J].农业工程学报, 2014, 30(22): 1-9.
[35] 高斌. 基于超声探测的果园对靶变量施药系统设计[D].太原理工大学,2018.
[36] 罗长海,孟志军,王沛东,等. 基于超声波的农药流量计设计[J].农机化研究,2014,36(03):194-198.
[37] 戢冰. 基于ARM的变量喷药控制系统设计[D].中国农业机械化科学研究院,2018.
[38] 孙琦. 基于单片机的施药监测系统设计与试验[J].农机化研究,2018,40(03):166-170.
[39] 玄子玉,张玉峰,张玲玉. 基于STC单片机的变量喷雾控制器设计[J].林业机械与木工设备,2011,39(09):43-45.
[40] 翟长远,朱瑞祥,黄胜,等. 基于单片机的施药监测系统设计与试验[J].农业机械学报,2011,42(08):70-74+84.
[41] 玄子玉,刘立意,张玉峰. 基于单片机的喷雾控制系统硬件电路设计[J].农机化研究,2010,32(02):183-184+190.
[42] 裴亮,李晔,冯耀宁. 基于PLC的喷杆喷雾机变量喷雾自动控制系统设计[J].农机化研究, 2018(4): 129-132.
[43] 吴小伟,蒋焕煜,周宏平. 基于单片机的雾化装置控制系统设计[J].农机化研究,2011,33(05):104-106+110.
[44] 艾剑锋,章海亮,刘雪梅,等. 基于AT89C52单片机的变量喷雾控制系统的设计[J].中国农机化,2011(02):90-93.
[45] 宋淑然,阮耀灿,洪添胜,等. 果园管道喷雾系统药液压力的自整定模糊PID控制[J].农业工程学报,2011, 27(6): 157-161.
[46] 桂启发,徐素明. 基于模糊理论的树冠图像边缘检测算法研究[J].江西农业学报,2014,26(08):109-113.
[47] 野秀玉,马立龙. 基于单片机模糊控制变量施药控制系统的研究[J].佳木斯大学学报(自然科学版),2013,31(05):740-742.
[48] 魏新华,蒋杉,张进敏,李青林. 脉宽调制间歇喷雾变量喷施系统施药量控制[J].农业机械学报,2013,44(02):87-92+86.
[49] 肖静. 基于脉宽调制的变量施药控制系统研究[D].南京林业大学,2018.
[50] 刘子文. 水稻变量施药信息处理系统设计[D].江苏大学,2019.
[51] 沈景新,李青龙,孙永佳,等. 喷杆喷雾机智能控制系统设计及试验[J].农机化研究,2019,41(01):133-137.
[52] 刘道奇. 悬挂式喷杆喷雾机变量喷雾系统设计及试验分析[D].河南农业大学,2018.
[53] 吴亚垒,祁力钧,张亚,等. 温室弥雾机控制系统的设计[J].中国农业大学学报,2018,23(02):79-87.
[54] 周良富,薛新宇,周立新,等. 果园变量喷雾技术研究现状与前景分析[J].农业工程学报,2017,33(23):80-92.
[55] 范小博,邓巍,吴桂芳. 飘移控制喷雾施药技术研究进展[J].农机化研究,2016,38(06):1-9.
[56] 范龙. 变喷杆式喷雾机可变喷量施药控制系统研究[D].南京林业大学,2016.
[57] 胡鹏,刘志刚. 在线自动对靶喷雾控制系统研究[J].农机化研究,2016,38(02):67-71.
[58] 马伟,王秀,徐波. 温室智能装备系列之七十六 红外热成像检测技术用于农药变量喷洒监测[J].农业工程技术,2016,36(01):51-53.
[59] 陈志刚,陈梦溪,魏新华,等. 基于北斗定位的农田变量处方施药喷雾系统[J].排灌机械工程学报,2015,33(11):965-970.
[60] 李锟. 高地隙喷药机设计及其变量施药系统研究[D].哈尔滨理工大学,2015.
[61] 张佳琛,邓巍,张燕. 恒压变量喷雾技术研究现状[J].农机化研究,2015,37(02):257-260.
[62] 韩润哲,朱瑞祥,翟长远,等. 施药机压力波动特性研究[J].农机化研究,2014,36(07):26-30.
[63] 王锦江,孙星,严荷荣,等. 注入式变量施药控制系统设计[J].农机化研究,2013,35(09):129-132.
[64] 蒋斌. PWM变量喷雾机的设计及其压力特性的研究[D].江苏大学,2018.
[65] 刘伟. 基于PWM的背负式喷雾器变量喷雾控制系统研究[D].南京农业大学,2012.
[66] 玄子玉,张玉峰,田思庆. 车载喷雾机变量施药控制系统的设计[J].农机化研究,2012,34(05):116-119.
[67] 吴吉麟. 变量喷雾装置喷雾特性及其控制系统的研究[D].上海交通大学,2012.
[68] 黄胜. 车载式施药机变量施药监控系统设计[D].西北农林科技大学,2011.
[69] 袁嘉嵘. LabVIEW电子电路模拟仿真设计[J].电子技术与软件工程,2019

1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:1158,如若转载,请注明出处:https://www.447766.cn/chachong/135368.html,