摘要
在现代技术的快速发展下,飞行器的种类也越来越多了,他们的应用场景和应用功能也越来越完善和复杂。举例来说,ps-x625型号就是大疆无人机生产的就是在植物保护方面有很好的应用,宝鸡的兴义生产的X8型号无人机在航空领域有很大突破,被使用于街道监控和交通管制,各种各样的无人机也应用于不同的场景,水下的无人机被应用于水下的搜索与救援,比如白鲨MAX无人机。无人机的性能主要决定于飞行器内部的控制系统与飞行器的航线规划功能。在航线问题上,在有任务需要使用无人机时,如果仅仅依靠飞行器操控人员的手来遥控与控制无人机是远远达不到目的的,在执行相应的工作时,对操控飞行器人员的心理者与技术都是一个很大的考验。为了防止飞行器专业飞手的操作出现失误和飞行器在不良环境下的损坏风险,其中的一种解决方式就是对飞行器的飞行轨迹进行规划。飞机测量飞行器高度,速度。,位置的准确性,与对外界环境信息收取真实性以及系统所产生合理的航线规划、飞行器运行的稳定性与安全性都是对于其来说的重要的因素。上述改变对于飞行器而言,在控制系统上的要求也在不断提高。无人机航空规划可以理解为出于保障无人机顺利完成任务的目的,事先规划无人机的运行轨迹,当飞行设备完成任务时可以根据现场实际情况规避各类风险和障碍物。
多个无人机协同工作是充分利用无人机天生的优势,利用多个无人机完成困难的任务的重要工具。在多个无人机一起工作中,良好的任务分配是用最低时间与经济成本完成每一个无人机的目标定位,是解决多个无人机多个任务问题的关键步骤之一;路径规划是指无人机在遇到障碍和危险的工作环境里从起点飞行到终点寻找最好最近路径。本文通过改进差分算法对无人机航迹规划展开多维度、深层次的分析和研究,在此基础上对算法进行优化和改进,以此加强多台无人机共同工作的整体效率。
关键词:无人机 合理规划 最优路径 改进算法
第一章绪论
1.1研究背景及意义
优化问题是一个古老而困难的问题,尤其是大型、多模态、多种类等的冗杂的优化问题。在发现问题并求解过程中,其中的复杂和多样是很让人头疼的,在传统的模式下,确定性优化算法并不可以很好的解决其中产生的问题,遗传进化算法也由此诞生。
在自然界中,进化是一个经历很久的的并且需要适应的进化过程。在模拟仿真大自然的进化历程中,大家提出了各种各样的问题,大家通过模拟算法来解决这些大型,多模态和多种类复杂优化问题。进化算法是在大自然中以进化的思想的基础上应运而生的一种通常会使用的求解各种各样问题方式方法。在最近的这些年,此方法在各行各业受到广泛关注,并在各种行业内取得了越来越显著的效果,遍地开花,成为遗传算法中最具生机的其中一个枝桠。
其实进化算法是使用简单的编写代码的技术来展示各种各样的繁杂的原理结构,并不会完整的描述出所有问题的所有特征,而是通过简简单单的编写代码的操作步骤与非常适合生存的大自然来选择与指导出学习方向与研究方向。由于进化算法对个体与种群都实施采用优化搜索的模式,这样就可以同时在空间中搜索多个区域来达到目的,因此很适合大规模大范围并行计算,而且不需要大量的额外的辅助信息(如导数),也可以不被搜索空间的不利条件所限制(如连续微分、单峰等)。这种新特性不仅保证了高效率,而且具有简单、易操作和通用性的良好特性。因此,进化算法越来越受到大家追捧与信睐。
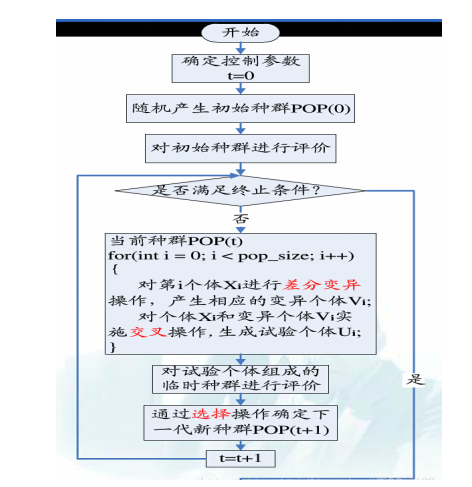
就如大家所知道的那样,在根据达尔文的进化论的思想,其实进化算法是在人工智能领域的占据了一个十分重要的枝桠,同时也收到全局研究算法的启发。这种算法以大自然的物种进化过程为模拟对象,其中涵盖了复制、变异、交叉与选择等过程。遇到这类问题,解决的基本思路是,首要任务是随机生成原始种群通过变分算子与交叉算子与选择器,然后通过在原始种群的基础上演变,最后选择下一代,并且重复到当时情况,直到满足条件后才会终止。
无人机(UAV)是一种LJ无线遥控的可编程自主操作或控制系统,它不仅执行有人驾驶飞机的功能,而且不受驾驶舱体积、飞行员身心状况的影响。这可以最大限度地提高控制效率,有效地增加负载和更大的阻力。无人机凭借这些优势,在军事技术领域备受关注。他是新军事技术、新武器平台的杰出代表。
他作为进化算法中的一个分支,DE算法是在1995年提出的,最初是Reiner Stor和Kenneth Price两人的观点。这些年以来,这种算法也在各个领域得到了广泛关注与应用,并且在世界各地的科研应用人员中得到了广泛的认可。他就是一种由实数编码为基本理论的全局优化进化算法.他独到的地方是在于引入了微分突变的思想来进行研究,其在全局研究能力与收敛速度上有很大的特点。如果遇到不简单的全局优化问题时,微分进化算法就被证明是一种高效的全局最优的搜索算法。收敛速度快是他的最大特点,并且他的算法十分简单,在这个领域苏需要的知识储备也不多.与其他算法相比,它更适合于解决冗杂的数据优化问题。这种方法因为简单、很容易实现、并且高效等特点.,也被广泛使用在全局优化、操作控制、工程设计等方面。
无人机在各个领域都有所涉及,同样也应用于军事领域,无人机的发展也越来越趋向战斗机领域。通过对无人机的利用,大大削弱了驾驶员驾驶战斗机的存在,避免了很多不必要的经济损失和人员损失。没有人在60年代。这种飞机首次被用作战斗武器。无人机像缴获和侦察武器一样闪闪发光,在阿富汗战争中首次作为进攻性武器,如X“捕食者”无人机多次成功对恐怖分子实施精确打击,为其成功奠定了坚实基础。在中国,有了W-50长时间的战斗力训练。206型多用途和“彩虹”无人机,标志着军事科技及相关技术取得重大进展。如今的的现代战争中,作战环境和条件也变得越来越复杂,随着大家对天空出现敌情时快速警备能力的逐渐加强,对防空领域的警备系统水平的飞速提高,多架无人机配合战斗,已经成为了当今社会作战条件下的主要战斗方式,也受到研究人员越来越多的关注。
多台无人机配合工作是为了能够决单个无人机的作战能力弱、响应时间长,打击策略简单等问题。当无人机作为独立个体执行多个上级传达的项任务时,无人机可起到协调各个部分的作用。举例来说,在使用雷达或者侦察机探测目标状况时,会发射导弹摧毁发现的目标或建筑等。和单体无人机相比较而言,多无人机共同作战具有优势。
1.2国内外研究现状
自从DE算法被发现以来,因为他的原理简单并且效率高,受到了很多在国内和国外的专家以及学者的重视与关注,并且他在很多不同的领域都出现了许多显著的的研究成果和案例。尤其是在最近的几年里,这种算法算法已经在国际进化算法方面的大放异彩,并且取得了很多领域的的重要理论和应用型研究成果。通过研究发现算法变异的作用机制表明,K.V.price由此提出了很多改进变异的具体操作,并并且对算法实施了特别详细的数据分析;Feoktistov由此提出了一种观点,广义指的是变异策略的主要框架,如此可便于在实际使用过程中根据不同的情况选择合适的变异操作类型,此举同样能够便于其他变异类型的计算,变异因子F和交叉概率cr,上述两个变量关系构成了差分进化算法参数。为了有效加速算法收敛的整体效率,大量学者开始对DE算法展开研究。比如,Hui Yuan和jouni lampinen在研究中提出三角变异的差分进化算法,并在此基础上对相应的变异功能模式进行优化和改良;Lee和其他成员提出了性步长的局部搜索来确定适合的变异因子,最后将算法的研究策略都加了上去;Roger gambelle和其他成员通过实验数据的分析来探讨算法参数的设定;Fan和其他成员[26]将DE算法与三角变异进行融合,可将其个体视为超三角形的关键中心区域,根据不同的分组步骤进行加权,形成超三角形的各个边移动,从而进化成新型的变异个体,此举能有效降低算法出现局部比较小的概率;冯雪等使用模糊逻辑控制理论动态调整算法参数[27];进化算法框架中存在若干种算法,Jakob Vester strom和Rene Thomsen针对粒子群算法、差分进化算法、遗传算法展开对比和研究,其研究角度侧重于微分进化算法解决难度较大的问题过程中展现出的绝佳的稳定性和收敛速度[28]。差分算法目前在多次优化和改善后,已经能够改善和优化各类复杂程度较高的问题,此外该算法还能够进行优化问题、训练人工神经网络、分析高性能聚类、研究文本聚类、优化生物反应模型中的参数、规划农业灌溉等。
近些年国内不少学者开始从不同维度对差分算法展开深入研究和分析,如高飞[29]在研究中提出空间收缩的种族灭绝是处于基础地位的差分进化算法,吴良红[30]在研究中提出通过种群适应性方差自适应作为多次变异的基础性算法,刘明光在研究中将差分进化算法与迁移操作有机融合,通过该算法展开计算,其能够促使此类多个非线性函数的非凸优化问题得到了很好的解决[32]。
虽然DE算法在多个行业得到广泛应用,但不可否认依然存在诸多缺陷和不足,其中包括:1)易致局部最优2传统的DE算法取决于变异率f和交叉Cr概率:遇到不同的问题,DE算法一定要设定不一样的f和Cr。所以很多专家学者提出了不同种类的变异策略,但在各种的策略下,处理不同的问题时表现也不尽相同,他们所应对的问题也不相同。总之,在DE算法初期缺乏系统性的规划。虽然在差分进化算法的理论层面取得一定的小突破,可是理论性的研究成果也是非常有限的。
目前国内外无人机发展研究现状
国内研究现状
我国于上个世纪70年代正式开展无人机和侦察机的制造研发工作,在上个世纪80年代初期我们国家开始正式装备航空领域。在中国目前来说,拥有无人机研究项目和有能力开发的技术部门仅仅有300多家,大约有160家企业在无人机领域已经具备了一套完整的研发,生产,销售,售后服务体系。最近几年来,伴随着国家对空防领域的高度重视,很多国内具有相关方向的院校也加大了在无人机领域发展的投入力度。到目前为止,中国无人机在很多领域与方向内取得了重大突破性进展。特别是在军事国防领域被广泛运用。据中国某些调查机构公布的数据《2017-2023年中国多轴无人机装备行业发展前景与投资战略规划分析报告》统计,到目前为止被使用的无人机已经超过100架,生产小型多轴无人机技术也越来越健全,与此同时微型的战略方向无人机也实验成功了,小型攻击型的无人机经历很多次尝试也成功发射了空对地导弹。据此,我们可以预测在未来的5年中,我们国家即将迎来无人机快速发展的时代。在14年,在国内无人机卖出将近100万台。在未来几年仍然有上涨趋势。在2014年,我国无人机方向民用市场销售额达到40亿元。随着科技水平的不断提高,无人机在军事国防领域占有一定地位。最近几年以来,国内无人机市场越来越大,直到到2020年国内无人机销售额有希望达到1000亿人民币。其中民用领域无人机将在未来得到快速发展。智能无人机在五年内申请国家技术专利达到1545项。
国外研究现状
X也发展了无人机方向,收到了国家航空航天局的重视,成立了无人机中心,与此同时在民间也开展了广泛研究,并且与海洋局和大气管理局共同合作,也增加了天气预报等科研,在2007年X森林发生大火出动无人机远程侦察火势大小,评估损害,此无人机机翼展开20米,飞行高度1万2千米,是用于民用环境监测的,在X,无人机的使用急剧上升,在越来越多的领域被投入使用。
以色列在无人机领域领跑全球,特别是无人机的生产设计领域比较先进,以色列专门为此成立委员会,该委员会的主旨在于对无人机性能进行全面调试和测试,埃尔比特系统公司开了先河,首先完成无人机所需的程序,在2008年以色列航空的无人机获得了国家空中领域的执行任务认证。从那时起,主管当局为各种民用任务进行了飞行员飞行合作。
在俄罗斯也有大量无人机开发项目实施,antigrad公司自主研发了先进的多功能无人机,其方向的广泛,包括预防自然醒灾害,对各种环境进行检测,对道路,天气进行监测,这种型号的飞机机翼长5.2米,宽9米。最大承重1100公斤,拥有两个螺旋桨发动机,飞行速度可以达到450公里每小时,最大飞行高度可以达到8000米,可以通过远程遥控台来遥控无人机进行空气检测。控制方式就是通过发射器进行数据传输,其应用场景也越来越广泛。
到目前为止,在日本无人机也受到重视,在农用领域得到广泛使用,已经注册的无人机达到2500架,操作无人机的飞手就有15000人,拥有世界上最大的农业无人机,到目前为止,民用无人机的发展方向已经涵盖很多领域,其中包括道路监测,快递派送,植物保护等,在未来几年,国内的无人机市场份额会迎来一个巨大增长,预计未来无人机方向会变得越来越智能,方向也会越来越全面广泛。
1.2.1 无人机任务分配
到目前为止,无人机的任务分配问题在国内与国外的都备受关注,这些问题都得到了国内外大量学者的解决,同时也得到了很多研究成果。这些成果主要分为两个方向,其一为任务分配的数学模型,其二为分配模型的优化处理。
1.任务分配的数学模型
在多架无人机共同合作问题上,通常情况下分为两种类型处理,第一种类型是单架无人机处理单个任务,另一个就是,多架无人机处理多个复杂任务,在这两种类型下,无人机的任务分配就成了无人机执行任务的首要问题,最终研究出不同的任务的分配数学模型,其中大多数是以经典赋值问题为根本。如下所示:
单一任务
(1)车辆路径问题模型。这一模型最早是为了解决乘客乘车问题,将无人机视为,车辆,任务视为最终的目的地,通过无人机的分配映射车辆路径调度问题。
(2)多旅行商问题模型。这个模型将无人机视为旅行商,将若干个无人机任务分配视为不同旅行商分配的问题,通常与存在一定时间限制的任务规划存在匹配性。
·多个任务的分配模型:
(1)混合规划模型。该模型分析每个任务之间的约束条件,如先后时序、能
效相关等,从而建立各个任务的约束规划模型。并结合任务之间的相关性,建立混合规划问题模型。
(2)动态网络流优化模型。这一模型能针对不同任务的约束条件进行研究和分析,比如时间排序、能效相关等,进而构建不同任务的约束规划模型,根据各任务的关联性,构建多种问题相混合的问题模型。
(3)协同任务分配模型。协同任务分配模型通常以三个维度展开的描述分配问题,分别是耗时、任务损失、目标价值。需要构建以上三个维度的单个因素优化模型,再采用加权转化的方式将各个因素进行混合,最后从中得出最终的优化分配方案。
2、分配模型的求解及优化
近些年在若干个无人机任务分配模型的优化方案的研究领域上,出现多种创新性的解决方法,可将其归纳为集中式和分布式两种类型。
集中式算法的特征在于整体结构复杂程度较低,便于操作,并展现出绝佳的计算性能,更多应用于无人机分配模型的求解。三种常见的算法如下:
(1)进化算法。采用模型生物钟的方式产生基因进化,针对不同个体采用具有差异性的进化方案,进而有效提升性能。引入生物进化的相关理论和原理,多无人机在执行任务过程中针对存在差异的任务选择的行动方案各不相同,从而全面提升多无人机任务完成的效率和质量。
(2)禁忌搜索。设计专门的禁忌表征,对现有的局部最优解进行设置,在求解过程中必须持续优化和更新最优点的任务,通过多个维度的对比和分析得出任务分配问题的最优解。
(3)粒子群优化。其在旅行商任务分配模型中同样适用,旅行商问题可以理解为任务分配的一种常规性表述形式,能够将粒子群算法结合无人机任务分配问题进行求解,通过相关研究说明该方法的整体成效比较显著。
和集中式求解原理存在差异的是,分布式求解主要将问题细化,再对细化后的问题进行求解,主要的算法有:
(1)基于合同网的市场拍卖算法。这种算法主要针对市场机制任务进行模型的方式展开,最终实现多任务的分配与协作,从中探究最优解。
(2)基于多Agent满意决策论算法。这种算法通常使用在合理解决无人机间的矛盾和利益冲突上。首先通过不同无人机的任务分配选择相应的任务集合,其次,根据不同任务选择展开对比和评估,最后根据评估内容和具体任务选择最优解方案。
(3)基于人工信息素的算法。这种算法首先出现在针对不同昆虫间的信息交流研究领域,研究人员将该模式应用到无人机任务分配的求解上,并提出假设,无人机在沟通时同样以“信息素”作为媒介,进而达到任务分配的目的。
1.2.2 无人机路径规划
路径规划技术指的是无人机在复杂多变的飞行环境下根据多种路径的计算和求解,得出飞行路径规划的最优解,该路径通常需要符合两个条件:
(1)确保无人机飞行过程中的安全,不与任何障碍物产生碰撞,并带着不同的飞行任务,路径规划必须要经过任务覆盖的范围。
(2)设计路径必须保证其是最优解,其中主要涉及的指标有运行时间、工作代价、运行长度等。
单个无人机的完整路径规划过程通常可划分为已知地形和危险信息获取。通常情况下,对无人机路径规划造成影响的因素包括地形、威胁模型、路径规划算法。
在实际使用过程中,不少因素本身并没有呈现明确的可量化,也无法通过数学模式表达,但是路径规划问题的最终目的是对各种位置因素纳入考量范围,基于此,必须将各类因素纳入数学模型展开计算,通常路径规划可划分为三个步骤:
(1)环境建模。根据无人机当前的具体环境信息,构建基础模型,针对物理空间建立相应的数学空间算法。
(2)路径搜索。在此基础上采用既定算法探究能够从起点到终点的路款项,这条路径必须在满足约束的前提下,又能实现代价函数的最小化。
(3)路径平滑。从上述步骤获得路径的理论数值,在制定飞行路径决策时可达必须根据最优值进行对比和分析。
随着无人机相关技术的发展,路径规划技术也在不断地提高,不过依然存在不少问题,具体表现在以下几个方面:
(1)在防空火力或雷达探测技术日新月异的环境下,无人机在执行任务过程中需要面对更为复杂多变的环境,在路程规划过程中时常存在不同因素间过于模糊的现象,其中包括机载设备、已知威胁等因素,都无法实现模型的精准化要求,这种模糊性也会导致决策输入过程中的难度更大。
(2)无人机操作通常将控制和管理分离,并通过相关设备发出指令,对机载设备进行控制,此类模式极易产生一定数据滞后现象,无形中造成无人机在路径调整时出现误差和延迟。
(3)无人机根据获取的信息展开对比和决策,但在实际运行过程中,战场环境更为复杂,仿生智能无法在此种环境下展现出如同飞行员的专业经验。
从上述论述得知,多无人机协同合作在分配任务和路径规划时已经能够通过健全高效的算法获得最优解,不过一旦在面临外部环境过于复杂的情况下,传统人工智能算法往往需要耗时较大,同时在算法上的整体性能与实际任务分配的数量和种类存在一定差距。很多时候这种路径规划问题需要考虑到威胁源、飞行环境等因素,是非常重要并亟待解决的
问题。
1.3差分算法简介
1.3.1差分进化算法的介绍
自然界的生物体通过遗传、变异、选择等多种生物进化运动,遵循优胜劣汰的自然法则,从而进行从低等动物到高等动物的进化,人们针对进化规律的底层逻辑进行研究和分析,得出仿真智能的最优解算法,也就是如今的进化算法。
进化算法涉及多种类型的技术,其涵盖进化编程、进化策略、遗传算法等内容,上述技术如今在深度学习、神经网络训练、模式识别、智能控制等领域得到广泛应用。虽然进化算法的种类较多,但底层逻辑和核心原理都是遵循自然选择学说,该学说涵盖遗传、变异、过度繁殖等。
为了得出切比雪夫多项式问题,Rainer Storn 和 Kenneth Price基于理念在上世纪90年代提出差分进化算法。该算法是通过连续空间中展开随机搜索的创新算法,同时这种算法是建立在群体持续更新换代的基础上实现的,整体结构较为简单,运算性能优越。众多研究人员对其进行深入研究和分析中发现DE算法,该算法能够将复杂程度较高的问题进行简化。
DE算法是建立在多个个体共同建立智能的理论基础上发展的,其利用不同个体之间的协同合作与良性竞争产生的群体智能对算法进行优化和指导。DE算法不但能够实现个体记忆最优解的信息共享,同时能对群体中的信息进行全面检索。此外,该算法能够独立运行,并不需要加入特征信息,同时也不必受到问题性质的影响,能够展现高效的解决问题能力。和确定性算法对比,该算法具备极强的兼容性,该算法目前已经发展成为针对不可微、多极值、非线性的函数进行求解的重要方法。
从工程角度研究和分析差分进化算法,可以理解为一种能够独立运行且不断迭代更新的过程,如果从数学视角分析,这种算法本身较强的随机性。其主要原理是建立在生物进化论中的优胜劣汰策略发展形成的,并通过父代不同个体之间的变异行为展开,也就是从随机的个体中产生最初形态的种群变化,并通过随机选择的方式选取两个个体,对两者的差向量加权之后根据特定规律和第三个个体向量产生作用,这就是变异的过程。并通过对新加入的个体阐述和随机的已知目标产生交替关系,从而产生多种向量关系,这种操作也可以理解为“交叉”,在此过程中,如果参与试验的个体适应性更优于其他个体,在迭代过程中就选择这一个体作为目标,最终需要将优良个体保留下来,通过引导搜索的方式不断迫近最优解。通过持续的迭代,个体向量必须是目标个体的向量一次,便于后续参与竞争者进行对比和分析。该算法特征在于:
(1) 便于计算,整体框架难度较小,可行性较强,不需要采用特定的确定性规则。
(2)能够储存最优解的个体,同时具备极强的群体检索性能;
(3) 差分进化算法的本身就有较强的并行性,能够通过不断研究和对比中产生关联性,同时可通过个体产生的不同信息和群体的全局信息对算法产生指导作用。
(4) DE算法的整体操作难度较低,便于在编程中实现,特别是针对尺寸较大的函数时最优问题求解;
(5) 这种算法兼容性较强,能够不需要问题特征参与,可对结构对象进行操作,同时不受目标函数的影响。
1.3.2差分进化算法的流程
(1)初始化种群
(2)变异
(3)交叉
(4)选择

1.3.3差分进化的具体步骤
对于无约束优化问题
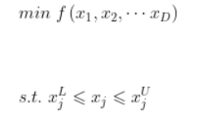
利用差分进化求解这样的优化问题,主要分为初始化、变异、交叉和选择等几项操作。
初始化
如前面的的群智能优化算法一样,差分进化也需要初始化种群
其中,Xi(0)是第个个体,j表示第j维。

其中,rand(0,1)表示在区间[0,1]上的随机数。
②变异
DE算法利用差分策略展现个体之间的不同,常规的差分策略主要通过随机筛选种群中的两个个体,缩放向量之后和需要变异的个体产生向量关系。
![]()
![]()
其中,r1,r2和是三个随机数,区间为[1,NP],F称为缩放因子,为一个确定的常数。9表示第9代。
③交叉
交叉操作的最终目的在于通过随机性的方式得到个体,由于差分进化同样属于随机算法的一种,进而得出交叉操作方法为

其中,CR称为交叉概率。通过概率的方式随机生成新的个体。
④ 选择
在DE中采用的是贪婪选择的策略,即选择较优的个体作为新的个体。
第二章 任务分配及路径规划
2.1 无人机任务分配
在防空体系日益复杂先进的数字化战争环境和复杂的商业应用中,多机协同、任务分配对无人机生存能力和适用性的提高有着重大的意义。
2.1.1任务分配原则
多无人机任务分配就是使编队内各飞机在环境及任务的要求下,使整体的效
率最高。总结其原则如下:
(1)实现最大化收益。
(2)以无人机运行角度分析,得出无人机达成任务的最优解。
(3)缩短无人机完成任务的时间,缩减飞行路程。
(4)编队内各无人机的使用率维持在某一水平。
能够将多台无人机协同任务分配问题视为不同目标中的最优解处理问题,通常情况下,此类问题通常需要参考多个指标,且相互之间存在相斥现象,求解过程中需要对多个指标进行加权处理,从而得到整体利益最合理的解决方案。
2.1.2 任务分配数学模型
任务分配模型,也可以理解为对无人机协同任务分配的实际环境进行表达。通常通过二维建模的形式呈现,对多个无人机的运行设置约束条件,预估各个无人机在执行任务中需要付出的代价和最终的收益结果。任务分配的优劣往往需要通过适应函数进行预估和评价,对适应度函数产生影响的主要因素通常有获得收益最高、付出代价最小、运行时间短。通常可将任务分配划分为重分配和预分配两种类型:
(1)任务预分配
预分配时期指的是针对已经明确的信息制定评估方案,在此过程中,需要方案能够灵活通用,对时间指标不做过多限制。可将任务分配理解为多种目标的最优解,因此对假设对位初始位置m个无人机和n个目标分配相应的任务,具体的任务矩阵可通过Am*n表示,矩阵中的元素为:
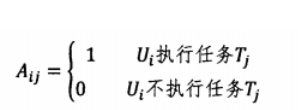
若要实现任务的目标,必须选择和建立计算方法,针对任务预分配方案中的收益矩阵B和付出代价C,如下所示:
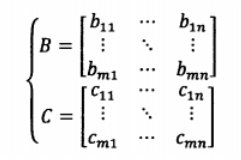
对以上两个任务分配的衡量指标,其对应的总代价与总收益如下式所示:
对于任务的总收益、总代价对应的最优化目标,即:最大化任务收益,最小化任务代价。公式表达如下:
(2)重分配阶段
重分配的通常侧重于对执行任务过程中存在未知因素,需要无人机对此进行迅速判断和响应,具备极强的环境的适应性。这个阶段的任务分配侧重于时效性,在此过程中,应当将时间指标作为任务分配的关键要素。
2.2 无人机路径规划
无人机路径规则需要根据特定区域范围内找出最优解的飞行路径,一般该路径的障碍物和无人机相对较少,符合无人机的飞行条件,并最大限度规避飞行中的各类风险,进而实现完成任务的最小化代价。
2.2.1 基本原则
无人机路径规则是引导无人机完成任务的重要条件,科学合理的无人机路径规划应当满足以下几点原则:
(1)具备合理性,也就是规划路径在实际应用必须具备较强的可行性,没有无法完成飞行任务的障碍。
(2)算法完备。可对所有飞行方案进行全面计算,一旦出现无解,能够快速探究其中的原因。
(3)路径最优,在特定飞行能耗和距离等指标的基础上,达到飞行路径的最优解。
(4)符合约束,无人机本身的参数和性能对飞行路径也会造成一定程度的约束条件,路径规划应当在符合各类约束条件的基础上展开。
(5)路径隐蔽,飞行路径应当合理规避危险源,同时根据飞行环境和敌对势力武器漏洞避开防控设备的跟踪与探测。
(6)时效性较强,能够快速进行计算,面对突发情况能够快速响应,不能出现延迟现象。
上述原则必须在满足飞行路径规划的前提下,根据无人机的实际情况选择,不仅能够引导无人机完成任务,同时也是评估无人机飞行路径的有效评价标准。
第三章 系统的设计与实现
多无人机协同任务规则通常需要通过特定软件操作,以下是控制多台无人机执行任务的系统。
3.1 功能需求
多无人机任务规划软件的主体功能涵盖:
1) 任务设置:任务场景、无人机特性、任务目标特性设置;
2) 分配准则设置:从过往经验来看,需要对分配的权重比进行调整;
3) 算法设计与实现:设计并实施任务分配的算法和路径规划算法;
4) 结果显示:显示结果。
3.2 软件设计
3.2.1 界面设计
软件主界面如图1 所示,主要包括无人机设置、输出参数。无人机设置中,左分别为模型类型,算法执行次数,飞行器位置,目标位置,速度能力矩阵,最大航程矩阵,目标点权重,时序关系矩阵;右侧显示输出结果;输出结果分为输出参数和路线图,输出参数分别为时间,soIF,soIU,soIT,soIC。右边区域为任务场景,其中涵盖无人机、任务所在目标位置,当完成飞行路径规划之后还能够显示最终的结果。显示加载过后的场景和算法具体时间。

图1多无人机修改参数演示-主界面
3.2.2 软件操作
a) 想定设置
1) 场景设置
在编辑器中输入gui,点击新建gui,即可新建。若已经有场景则改变当前场景,如没有加载场景则新建空场景。
2) 新建场景
新建一个如图2 所示的空白场景。
图2 新建界面
图3空白界面
b) 场景编辑
1) 无人机编辑
(1)添加
点击属性页中的按钮,在选项中中单击鼠标左键,场景相应位置拉出一个随意大小的空白位置,空白可调节大小,位置,点击右侧按钮可在空白处输入文字等,所在的表格中会自动添加相应的文字,如图4 所示。 (一) 对“空白格”表格直接进行添加、编辑和删除,如图 4.4 所示。
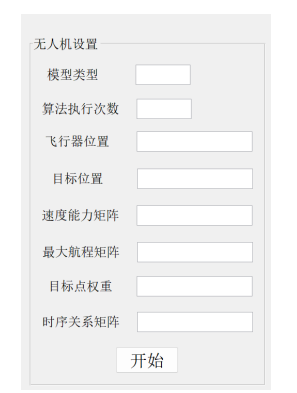
图4空白格输入示意图
(二) 在空白格中依次输入文字,并拉几个空白格编辑,设置完成后弹出如图 5 所示的编辑对话框。
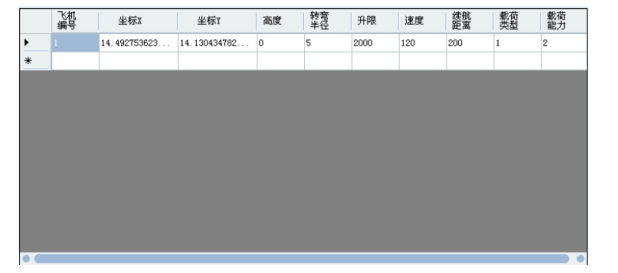
图5参数设置界面
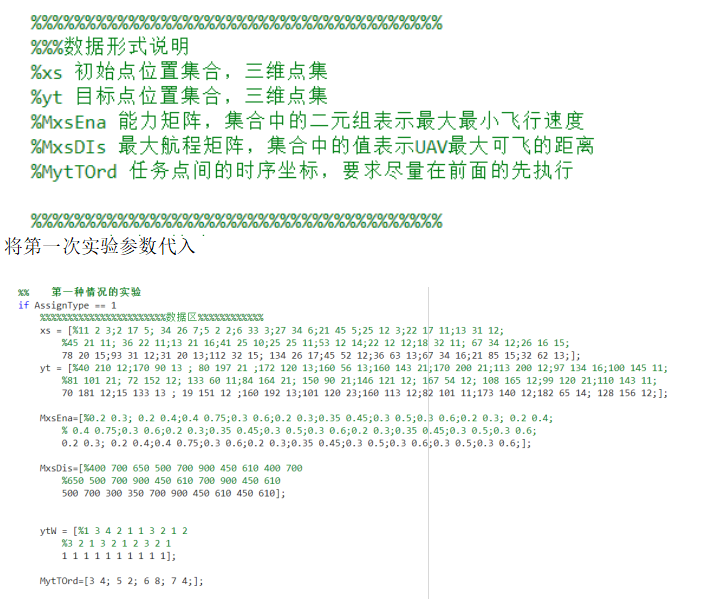
2) 参数输入各参数意义在代码中有所体现,都被注释,
xs 初始点位置集合,三维点集
yt 目标点位置集合,三维点集
MxsEna 能力矩阵,集合中的二元组表示最大最小飞行速度
MxsDIs 最大航程矩阵,集合中的值表示UAV最大可飞的距离
MytTOrd 任务点间的时序坐标,要求尽量在前面的先执行
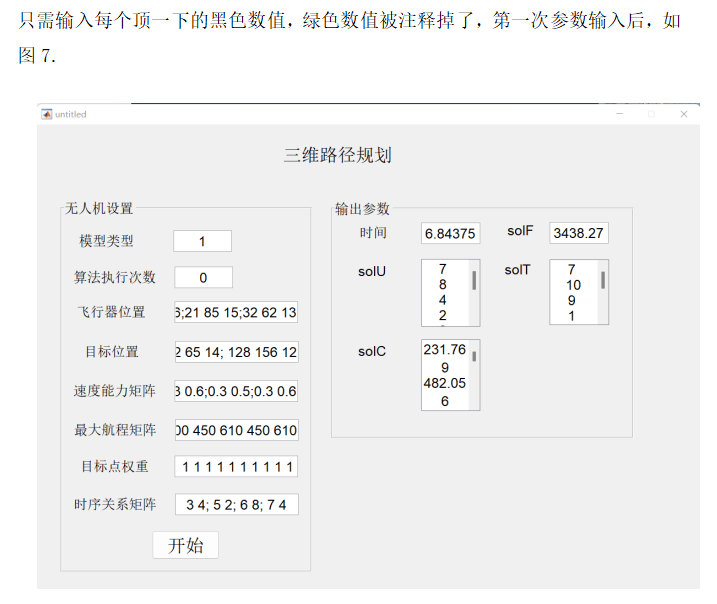
将第一次数值输入后,运行程序,几秒后,输出参数时间,soIF,soIU,soIT,soIC数值显示,同时显示无人机的路径规划图,与算法优化过程。
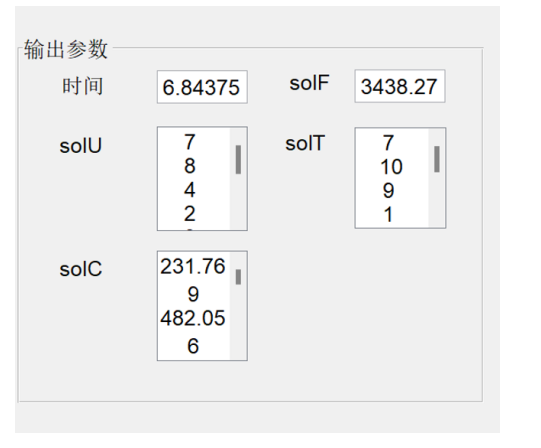
图8规划结果区域
第二页为航路规化结果如图9 所示。根据选择框选择的飞机号,显示对应飞机的规划航点。
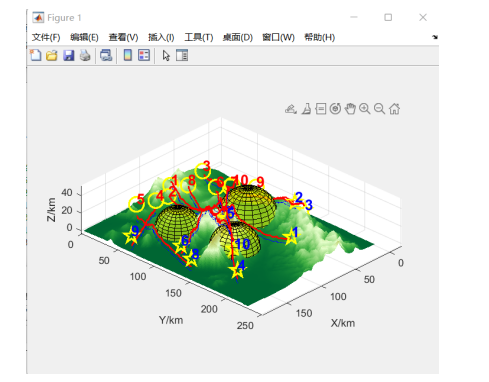
图9规划航点显示区域
该图显示无人机运算的最终结果,主要通过差分算法达到最终的任务规划,在表格中显示为每次进化过程中任务分配的结果。如图10所示
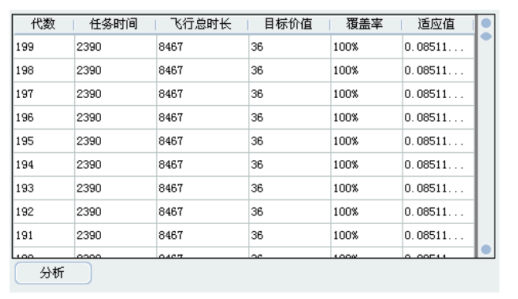
图10算法实现结果
点击运行后,就会出现每次优化后的结果曲线,如图11所示
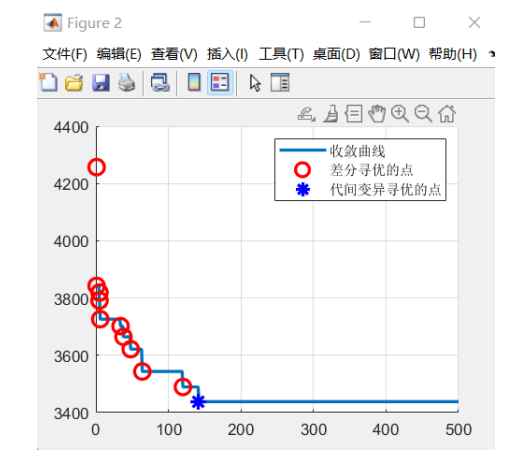
图11算法进化过程
3.3算法验证
首先要通过相应的方法验证飞行路径,再根据飞行路径的结果设置相应的约束条件,在路径规划过程中应当纳入重点考虑范围,最后将其作为路径规划内容输入,以此作为多无人机飞行任务算法的验证。
3.3.1路径规划算法验证
针对以明确得知的起点和终点,需要对战场的各类情况综合考量,以此作为路径规划基础。对路径规划产生影响的参数为k。
场景一:单架无人机,五个目标分布如图12所示,P 代表无人机位置,A 代表任务目标位置,战场态势如图所示。
对5 号目标进行初始路径规划,规划结果如图12(a)所示,优化后的结果如图12(b)所示,经过 1 次优化后,路径被尽量拉直;经过 2 次优化后,规划出的路径与无人机的特性更为契合。
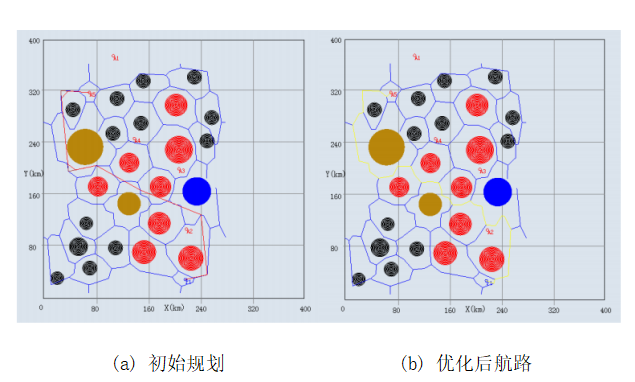
图12 航线规划结果
不同验证参数验证产生的结果存在差异,k值越大,说明需要对燃油消耗结果的重视,k值越小,需要对危险源代价作为重点考虑对象。根据本次研究的实际情况,其参数分别为0、0.5,针对两个目标的飞行路径进行规划。通过具体的规划结果分析,为了最大限度规避威胁,必须以增加燃油作为完成任务的代价。

图13初始规划航路结果
第四章 结论与展望
4.1 研究结论
本次研究主要目标是建立在优化差分算法的多无人机协同路径规划展开设计,通过优化和改进差分算法达到无人机协同任务分配的效果,通过计算和演示等方法规划多无人协同任务规划的路径。从而有效提高飞行路径模型的可操作性。从相关验证结果反映,这种算法可以实现多无人机多任务共同运行和调度的需求,规划结果符合预期目标。本次研究在大量查阅相关文献的基础上,对多无人机协同任务规划展开多维度、深层次分析和研究。
1.对无人机协同任务的背景、意义、内容进行简要概述,并梳理该课题当前的研究现状,并将研究内容细分为任务分配和航路规划两个方面。
2.详细介绍了差分算法,描述了差分进化算法的过程。在此基础上,对差分进化算法的具体步骤进行了梳理。
3.详细描述了基于改进差分算法的多无人机协同三维航迹规划中的两个任务分配和航迹规划环节,阐明了其原理和模型。
4.基于以上内容,本文尝试对系统进行设计,并对系统的界面、功能和操作进行了详细的介绍和说明。
5.为了有效验证本次算法的可行性,在仿真基础上对其可操作性进行多次验证。在具体演示过程中,针对具有代表性飞行场景时,规划两种类型的多机任务执行路径。从验证结果反映,这种算法符合多机多任务的调度要求,规划结果具备较强的可操作性。
4.2 研究展望
以下是当前研究中亟需解决的几大问题:
1.本次研究主要采用的算法以及基本搜索为主,从目前国内外无人机的整体发展现状分析,飞机群体作战技术、飞行任务规划、协同控制技术成为无人机未来的发展方向。并成为多国军事领域重点研究的目标。基于此,为了对多无人机多任务进行规划,需要加强国外先进科技和理念的学习和借鉴;
2.我国目前采用的算法依然以任务前规划为主,也就是无人机开展飞行任务前期,以过往经验和已知因素对飞行路径进行规划。对于无人机的多任务实施规划并没有过多涉足。在后续研究中应当加强对这方面的考虑和研究;
3.目前算法验证通过以通用方法实现,这种算法得到充分验证,不过并非实现多机多任务飞行路径规划的最优解,从多无人机协同任务的特征来看,需要持续优化和改进具体的细节和内容,从而提升规划效果的合理性;
4.在情景中,用于假设的因素和指标过于局限,模型飞行中往往没有对复杂场景进行模拟,需要在后续的研究不断优化和完善仿真模拟软件。
参考文献
[1] 叶媛媛.多 UCAV 协同任务规划方法研究.[国防科学技术大学博士论文].长沙:国防科技大学,2005.
[2] 曹璐,贾银平,张安.基于改进人工蜂群算法的多无人作战飞机协同航迹规划. 计算机应用.2013
[3] Chandler, P.R., M.Pachter. Hierarchical control for autonomous teams. AIAA-2001-4149.
[4] 4.Chandler, P.R., M.Pachter. Complexity in UAV cooperative control, Proceedings of the American Control Conference, Anchorage, AK, 2002 .5.8-10.
[5] 叶媛媛,闵春平,沈林成.多 UCAV 任务分配的混合遗传算法与约束处理. 控制与决策,2006
[6] M.Alighanbari, Y Kuwata, J.How. Coordination and control of multiple UAVs with timing constraints and loitering. American Control Conference, 2003.
[7] T.Richard, MacMillan, etc. Knowledge Based Route Planning, Proceeding of IEEE, 1990 NAECON.
[8] Thomas A.Clark. Analysis of the Force Level Automated Planning System. RADCTR-89-300, RADC Internal Report, 1989.
[9] 张之,李建德编著.动态规划及其应用. 北京:国防工业出版社,1994.
[10] Robert J. Szczerba, Peggy Galkowski, etc. Algorithm for Real-Time Route Planning, IEEE Transactions on Aerospace and Electronic System, Vol36(3), 2000.
[11] M.C.Bartholomew-Biggs, S.C.Parkhurst, S.P.Wilson. Using DIRECT to Solve an aircraft Routing Problem, Computational Optimization and Applications, 21(3), 2002.
[12] John Bellingham, Michael Tillerson, etc. Multi-Task Allocation and Path Planning for Cooperating UAVs.
[13] R.V.Helgason, J.L.Kennington, etc. Cruise Missile Mission Planning: A Heuristic Algorithm for Automatic Path Generation, Journal of Heuristic, 7:473-494, 2001.
[14] 符晓卫. 无人作战飞机路径规划算法研究.[博士学位论文]. 西安:西北工业大学,2004.
[15] 高晓光,符小卫,宋绍梅.多无人机航迹规划研究.系统工程与理论实践,2003(5).
[16] 郑昌文,丁明跃等. 多飞行器协调航迹规划方法.宇航学报,2003,24(2):115-120.
[17] Veldhuizen.D.A.V. Multiobjective Evolutionary Algorithms: Classifications, Analyses, and New Innovations, Ph.D Dissertation, Graduate School of Engineering of Air Force Institute of Technology,1999.
[18] 刘旭红,刘玉树等.多目标优化算法 NSGA-II 的改进,计算机工程与应用,2005 (15).
[19] Veldhuizen.D.A.V,Lamont.GB. Multiobjective Evolutionary Algorithms Analyzing the State-of-the-Art. Evolutionary Computation, 2000, 8(2):125-147.
[20] 河南省高等学校青年骨干教师培养计划(2020GGJS141): 进化算法在多无人机协同航迹规划中的应用研究.
[21] Price K V. An Introduction to Differential Evolution [J]. New Ideas in Optimization, 1999:79-108.
[22] Feoktistov V,Janaqj,S. Generalization of the strategies in differential evolution[C].Proc of the 18th Int Parallel and Distributed Processing Symposium .Santa Fe,2004:165-170.
[23] Hui Yuanfan, Jouni Lampinen. A Trigonometric Mutation Operation to Differential Evolution [J]. Journal of Global Optimization, 2003(27):105–129.
[24] Lee M H,Han C H ,Chang K S.Dynamic optimization of a continuous polymer reactor using a modified differential evolution algorithm[J]. Industrial &Engineering Chemistry Research,1999,38(12):4825-4831.
[25] Gamperle R, Dmuller S, Koumoutsakos P. A Parameter Study for DifferentialEvolution [A].International Conference on Advances in Intelligent Systems,Fuzzy Systems, Evolutionary Computation[C], 2002:293-298.
[26] Fan H Y, Larnpinen J.A trigonometric mutation operation to differential evoution[J]. 2003,27(1):105-129.
[27] Feng Xue, Sanderson A C, Bonissone P P, Graves R J. Fuzzy Logic Controlled Multi-Objective Differential Evolution [A], the 14th IEEE International Conference on Fuzzy Systems[C], 2005:720-725.
[28] Vesterstrom J, Thomsen R. A comparative study of differential evolution, particleswarm optimization and evolutionary algorithms on numerical benchmarkproblems [A]. Congress on Evolutionary Computation[C], 2004:1980-1987.
[29] 高飞,基于空间收缩的种群灭亡 DE 算法[J],复杂系统与复杂性科学,2004.4.
[30] 吴亮红、王耀南、袁小芳、周少武, 自适应二次变异差分进化算法[J],控制与决策,2006,21(8).
[31] 刘明广.差异演化算法及其改进[J],系统工程, 2005.2,23(2).
[32] 刘明广,李高扬.差异演化算法在机械优化设计中的应用[J],机床与液压,2006,5.
[33] STORN R, PRICE K. Differential evolution: a simple and efficient adaptive scheme for global optimization over continuous spaces [EB/OL]. 2010,10,25. http://www.Icsi
Berkeley.edu./storn/TR-95-012.pdf.
[34] STORN R. System design by constraint adaptation and differential evolution [J]. IEEE. Transactions on Evolutionary Computation, 1999, 3(1):22-24.
[35] THOMSEN R. Flexible ligand docking using differential evolution [C]. Proceedings of the 2003 IEEE Congress on Evolution. Computation. Canberra, Australia,2003:2354-2361.
[36] 高晓光,符小卫,宋绍梅.多无人机航迹规划研究.系统工程与理论实践,2003(5).
[37] 郑昌文,丁明跃等. 多飞行器协调航迹规划方法.宇航学报,2003,24(2):115-120.
[38] Veldhuizen.D.A.V. Multiobjective Evolutionary Algorithms: Classifications, Analyses, and New Innovations, Ph.D Dissertation, Graduate School of Engineering of Air Force Institute of Technology,1999.
[39] 刘旭红,刘玉树等.多目标优化算法 NSGA-II 的改进,计算机工程与应用,2005 (15).
[40] Veldhuizen.D.A.V,Lamont.GB. Multiobjective Evolutionary Algorithms Analyzing the State-of-the-Art. Evolutionary Computation, 2000, 8(2):125-147.
[41] 河南省高等学校青年骨干教师培养计划(2020GGJS141): 进化算法在多无人机协同航迹规划中的应用研究.
致谢
首先,我要感谢我的导师。他严谨、一丝不苟、一丝不苟的作风,一直是我工作学习的榜样,对我起到了带头作用;他们富有教育意义的教学和非正式的思考给了我无限的启发,让我感受到了设计的乐趣,并很快融入其中。其次,我要感谢同班同学的帮助和指导:没有他们的帮助和信息,没有他们的鼓励和补充,这次毕业设计就不会这么顺利。
本科项目持续了三个月,这是我在大学学习期间遇到的时间最长、内容最广泛、设计最伟大的作品。用老师的话说,这个学位项目相当于整合之前的小课程项目的过程。只要你抓住每一份小简历的精髓,紧密联系,完善逻辑,这次的任务就不会困难。这次我的任务是为一个项目创建一个报价文档。虽然老师的话让毕业设计没那么糟糕,但当我真正开始的时候,它真的很难。
俗话说:“砍柴磨刀是没有错的。”当我遇到不懂的问题时,我会第一次把它记在笔记本上,然后在回答问题时问两位老师。老师告诉我,我问的所有问题都是答案。我从不怪我的问题有点简单,而是反复提醒我在设计中要注意什么,从选题到项目最终完成,老师们总是给我细心的指导和不断的支持,真正起到“说教解惑”的作用,让人佩服。此外,我们的团队和老师还有另外两个沟通渠道:电话和互联网。因此,老师专门成立了一个小组,让每个人都能在第一时间收到研究生项目的最新新闻和材料。每一次,每个人都乐于在小组中讨论学士学位项目。在许多日日夜夜里,两位老师不仅对我的学习给予了认真的指导,而且对我的思想和生活给予了无微不至的关怀。除了老师们的专业水平外,他们严谨的学识和科研精神也是我学习的永远冠军,并将对我未来的学习和工作产生积极影响。表示衷心的感谢和崇高的敬意。
当论文即将完成时,我的心情无法平静。从考试开始到定期完成论文,有多少尊敬的老师、同学和朋友给了我无言的帮助。请接受我诚挚的感谢!
最后,我还要感谢信息与电气工程学院和我的母校河北工程大学在过去四年里对我的培养。

1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:打字小能手,如若转载,请注明出处:https://www.447766.cn/chachong/67166.html,