摘要
随着近些年社会经济的发展,现代社会对于大自然的索取不断增加,自然资源需求量呈现逐年递增趋势,陆地资源在数十年的开采中已经无法满足现代发展的需求,于是各国开始将关注点集中在海洋资源。而无人艇作为勘探海洋资源的重要工具,由于其灵活性和自主性的优势,在海洋资源勘探中发挥极为关键的作用。随着海洋资源勘探事业的不断发展,对于无人艇的性能要求也在不断提升,基于此应当加强智能化、网络化决策的探索与研究。其中,科学稳定的轨迹定位能为无人艇的运行提供重要技术,也成为水下无人艇执行任务中的关键保障。因此对水面无人艇轨迹跟踪系统的研究和探索具有重要的理论与实践意义。
本次研究基于水面无人艇轨迹跟踪控制器设计展开多维度、深层次的分析和研究,主要研究框架如下:
1.以动力学和运动学为切入点对水面无人艇的动态形态展开研究,并与轨迹跟踪控制机的设计要求进行有机融合,构建基于水面无人艇三自由度运动模型。
2.研究自动搅动观测器的无人艇反步法轨迹跟踪控制机的设计理念和设计方法。这种控制系统的设计涉及动力学回路控制和运动学回路控制两方面的理论。首先在运动学中通过微分变换转换惯性坐标,进而成为可直接读取的无人艇坐标,在此基础上出于加强跟踪精确度和整体性能的目的,引入位置误差积分项来设计虚拟速度控制律;在动力学回路控制律设计环节,根据 Lyapunov 函数设计系统实际控制律,同时结合搅动观测器得出的数值对具体的控制量进行前馈补偿,从而有效提升水面无人艇轨迹跟踪系统的整体抗干扰性能。
3.通过构造Lyapunov 函数分析系统稳定性,并利用matlab来做一个数值仿真实验来验证控制器设计方法的有效性。
关键词:水面无人艇;三自由度数学模型;反步法;扰动观测器;Lyapunov 函数
第1章 绪论
1.1选题背景
在社会经济全面发展的时代背景下,科技研发成为社会发展不可获取的重要驱动力,无人技术作为近些年兴起的创新领域,在研发成果在各行各业得到广泛应用,从无人技术的角度分析,其在战争、生产、生活等领域展现了广阔的发展空间。X通过无人机打击恐怖组织,同时无人驾驶车辆也在现代军事中发挥中央作用,上述例子都展现了无人技术应用范围正在不断扩大和深化,可以预见的是,未来的社会经济发展对于无人技术的需求将会不断提升。无人驾驶、无人机、水面无人艇等装置在多个领域发挥无法比拟的作用。无人艇作为一种反应灵敏、灵活度高的无人设备,可通过远程遥控的方式进行各类操作,可完成人类难以完成的高难度任务。随着科技水平的持续发展,现代战争中的作战方式也在持续革新,水面无人艇将会发展成为无人作战系统中极为关键的构成部分,降低士兵进入战场的概率,最大限度减少人员伤亡,现代战争的博弈在于科技,水面无人艇是海战中创新型武器,其具有体积小、隐蔽性强等特点,能够配合作战计划完成各类高难度的协同作战,同时也是获取情报的关键手段,在军事领域得到普遍认可,是各国重点研究的新型武器。科技水平的发展,为无人艇的研发和使用奠定良好的技术支持,也让无人艇的应用范围不断扩大。在条件允许的情况下,还可以通过无人艇实施多种作战计划,是未来战场上极为关键的秘密武器,同时也是科技发展的重要体现。近些年,世界各国在海域主权的争夺尤为激烈,甚至不少海域存在诸多争议。无人艇具备的人为操作的船舶所不具备的优势,能够高效灵活完成各类作战任务,同时可安装多种传感器和武器,开展多种精准打击任务,除此之外,无人艇还可以与大型舰艇形成组合,在情报收集、战略打击、排除险情等方面发挥重要作用。以搭载在大型舰艇上,在作战、情报收集、排除危险等工作中有着无可替代的优势。
1.2理论意义和应用价值
水面无人艇的航迹跟踪控制的目标是确保艇体根据事先设定的轨迹运行,在实际运用中,主要集中在编队控制、自动运转等问题上。其中主导因素是时间的影响,跟踪控制可大致划分为轨迹跟踪和路径跟踪两种。两者的差异主要体现在,路径跟踪通常只需无人艇根据事先设定的轨迹运行,不受时间因素的影响。而轨迹跟踪则需要无人艇在特定时间内完成既定目标,即达到指定位置。一般情况,处于时间因素的考虑,轨迹跟踪的实际运用中的复杂性和完成难度广告,需要综合考虑应用场景,对时间上有较为严格的限制,讨论水面无人艇轨迹跟踪控制。
在研究水上无人艇轨迹跟踪控制的过程中需要考虑很多因素。首先,水面无人艇大多是全单舵,由于在船体的横向摇晃方向上没有控制输入,所以是间歇驱动系统[7-8]。接下来,由于在动力学模型中存在不可积累的二次约束条件,所以它也是非完整系统。最后,考虑到外界干涉[9],水面无人艇整体质量较小,和大型船舶相比,更需要综合考虑风浪、洋流等自然因素,上述因素也会对无人艇轨迹跟踪造成不同程度的影响。水面无人艇轨迹跟踪的研究涉及船舶系统、欠驱动控制、模型不确定性、非线性系统等多个领域的知识,因此本课题的研究成果不仅可以推进水上无人艇轨迹跟踪控制理论的发展,还可以进一步深化以上相关领域的研究。
1.3国内外研究现状
1.3.1水面无人艇应用研究开发现状
由于水上无人艇的应用前景极具魅力,因此与许多最尖端领域相关,工程的开发很难,即使对技术的要求很高,很多国同样关注到其广阔的应用价值和应用前景,通过多种方式和措施持续提升研发投入,其中以色列和X在无人艇的研发上领跑全球。国内关于水面无人艇的研发进程起步时间较晚,不过各部门对这项技术的研发予以高度重视,不少部门积极参与,其中知名度较高的有云洲智能、中船重工等企业。而在国外,X宇航系统中心研发的“斯巴达”号、以色列研发的“保护者”号、我国宇宙科学技术集团研发的“天象1号”等设备的技术涉及到无人艇的技术。上世纪90年代初,X正式开启关于水上无人艇研发任务,2007年,“海军无人艇水面艇计划”正式启动,并设定四个任务等级的,对无人艇的基准、规格、尺寸做出明确要求。X研发的无人艇装载的两种不同尺寸和规格的空气舰艇,而上文提到的“斯巴达”号正是基于空气舰艇的设计理念发展而成的,该舰艇主要通过模块化设计,因此舰艇均由多个组件构成,能够根据实际情况配置不同的元件。基于此,该舰艇不但能够完成各类作战任务,其在研发成本控制上也具备极强的优势。如图1.1所示。该无人艇长度达到11米,重达1674公斤,吃水深度为0.91米。根据无人艇的设计要求,其必须在三级海情中达到50节的航速,而该设备的最大航线为1000海里,能够在光线微弱的夜间开展多种行动,通过远程遥控完成夜间任务。虽然“斯巴达”号体型不大,却拥有强悍的战斗力,可根据不同作战任务搭载多种武器装置,能够完成多种水上军事任务,可实现海面对地面的精准打击任务。


图1.1“斯巴达”水面无人艇
同X相比,虽然我国在水面无人艇研发起步时间较晚,但近些年呈现全面发展之势,从相关数据统计分析,我国目前的无人艇研发机构分别为哈尔滨工程大学、上海海事大学、沈阳自动化所、中国航天科工集团等。与发达国家相比,我国目前在无人艇研发水平上依然存在较大的追赶空间。
中国航天科工集团新光公司是目前国内无人艇研发领域的佼佼者,其研发且投入使用的“天象1号”无人艇可实现远程操控。该无人艇总长为6.5米,均采用新型碳纤维材料制作而成,同时搭载多种智能化设备。其在2008年青岛奥帆赛期间,主要任务为在特定范围内对水文条件和气象条件的测量,成为该赛事气象保障的重要设备。此外,该无人艇能够对数百公里的气象进行测量,可在海上连续作业超过20天,为我国灾害预警和海洋环境监测作出了重要贡献。
哈尔滨工程大学自主研发的水下机器人是我国研发无人艇事业的重要里程碑,水下机器人在多个研发领域获得可喜的成绩,关于水面无人艇的研发工作处于关键时期。
沈阳自动化所打造的三体无人艇的电机驱动以直流电为主,该艇航速为4-6节,通过艇载控制系统和地面控制系统对无人艇进行控制。地面控制系统涵盖计算机和操纵杆;后者涵盖计算机、数据采集设备、传感器等。此外,该艇搭载了GPS导航设备、角速度传感器等。

图 1.2“天象1号”水面无人艇
1.3.3 路径跟踪控制的研究现状
从全球无人艇研发领域来看,船舶轨迹跟踪作为该领域的研究重点,船舶轨迹跟踪通常指的是在远程控制的情况下,船舶在各个位置都能够在特定时间调节后沿着既定轨迹行驶,同时与被跟踪物体保持一定距离,直至达到事先设定的跟踪位置。跟踪性能很大程度与时间要求息息相关,通常可将轨迹跟踪细分为轨迹跟踪和路径跟踪。路径跟踪需要针对船舶系统的具体情况和路径进行函数映射,对于特定时间的位置不做特殊要求。OhSR等[10]考虑在符合初始目标的条件下,也就是不受外部因素影响和明确船舶参数的情况下,通过LOS方法设置舵角控制策略,进而达到船舶路径的跟踪目标。Skjetne R等[11]在Serret-Fxenet坐标体系中设计跟踪轨迹和跟踪计划,同时降低曲线理论融入其中。Zhao Hui等[12]在研究中对路径跟踪误差展开深入研究和分析,并对跟踪误差进行微分同胚处理,在此基础上引入backstopping方法设计欠驱动船舶跟踪系统,相较于LOS方法,其优势在于极大简化设计流程中的中线反馈内容的计算。K D Do[13-14]应用backstopping技术、Lyapunov直接法和投影算法,研发设计船舶路径跟踪设备,在确保欠驱动船舶即便存在诸多外部因素干扰的环境下依然能够顺利完成既定任务。卜仁祥等[15]的研究侧重于对欠驱动船舶路径跟踪系统展开,并综合考虑各类干扰条件,通过坐标变换的方式构建船舶跟踪模型,在此基础上采用迭代滑控制模式控制的船舶运行规律。沈智鹏等[16]在研究加入学习方法,从而有效优化和改善控制参数,设计出搭载强化学习系统的欠驱动船舶路径跟踪系统,采用神经网络算法逼近模型未知部分,并设计参数自适应律用于对外部干扰因素或慢时变干扰因素的干扰补偿。王浩[18]针对若干艘自主船舶的协同路径跟踪控制系统展开深入研究和分析,在研究中综合考虑船舶参数和未知干扰因素之后,引入动态表面控制和神经网络控制技术,设计船舶路径跟踪控制系统,极大简化控制系统的计算流程,并达到预期设计目标。
1.3.3 轨迹跟踪控制的研究现状
Do等人在研究中引入李雅普诺夫直接法反步法设计轨迹跟踪器,在此基础上对设备的输出状态进行综合记录和研究,使其达到有效抗干扰的跟踪效果。2007年,Aguiar等人围绕未驱动水下无人艇模型参数无法确定的前提下分析轨迹跟踪问题,并根据实际情况提出能够自动切换的运行法则,并在此基础上根据伊普诺夫的跟踪法则理论,提出位置跟踪误差系统。该系统可有效收敛的问题,并引入研究模型对其可行性进行验证。2008年,Ashrafiuon等人在研究中对滑膜控制系统进行设计与改装,将其应用在跟踪控制系统上,为了解决参数不确定下的跟踪问题,分别采用1次滑动型面和2次滑动型面来设计纵推力控制器和航向控制器[22]。2010年,我们提出了一种基于条件积分的曲线轨迹跟踪方法,用于持续存在未知干扰时的跟踪问题。这种控制方法综合了几分作用鲁棒性和滑动控制方法,并合理规避了传统系统中抖动过大的缺陷,并进入研究模型对其有效性和可行性进行验证。2011年,Movahhed[24]等人围绕无人艇的外部干扰下的跟踪问题展开多维度的分析和探讨,并在研究中引入多个滑动控制界面,它们分别代表横向和纵向运动跟踪误差。获得的自适应滑动控制方法提出可确保跟踪位置一致性的想法。2013年,Fahimi围绕无人艇模型的未知性对跟踪控制问题展开深入研究和探索,并以此为基础构建非线性模型对其进行控制,最终通过实证研究的方法验证本次设计的可行性和有效性。2014年,Valenciaga等人围绕双螺旋桨驱动无人艇降低滑动控制中的振动问题展开分析和研究。[26]。2017年,Ashrafiuon等人在研究中针对未知性的干扰因素轨迹跟踪问题展开研究,并在此基础上引入非线性滑动模式控制法消除其中的误差。一旦边界出现无法确定的干扰因素,可通过控制规则来控制[27]。2019年,Van在研究中设计了积分型滑动控制,并引入反转法进行控制,设计出拥有滑膜技术的干涉观测设备,有效提升船艇的跟踪效果[28]。
2007年,李铁山等人在研究中针对船舶的直线跟踪任务展开研究,并在研究中引入Nussbaum增益技术的反步法,通过模糊逼近法确保系统信号保持一致[29]。2014年,张国庆[30]等人在研究中为了有效排除模型中的未知性和干扰因素等问题,引入反步法和非线性函数近似法对未知因素进行前馈补偿,在此基础上通过学习法有效解决“计算膨胀”等问题。此外,Yang等人围绕各类未知因素的轨迹跟踪问题展开深入研究和探索,在此基础采用观测器扰动装置,并综合矢量回步法设计跟踪控制设备,并通过模型验证该设计的可行性和有效性。2018年,Qu等人通过估计器确保跟踪系统的稳定性[32]。同年,Zhu等人在等人在研究中将符合不确定项转化为虚拟参数,并引入自适应矢量反转设计法对跟踪轨迹系统进行优化和改进,通过估计参数等方式有效提升控制设备的整体性能[33]。这一年,Sun等通过构筑连续的适应项来降低滑动型控制的抖动,采用反步法将船体的电位逼入最近的期待值,实现了模型的不确定和环境扰动存在时的轨迹追踪控制[34]。
1.4论文研究内容及结构
因此,文章的结构安排如下。
第一部分主要对水上无人艇跟踪轨迹的研究背景、意义、内容进行简要阐述,同时对国内外相关研究结论和研究方法进行梳理和总结,从多个维度分析当前水上无人艇轨迹跟踪系统中存在的问题。
第二部分对水上无人艇的相关理论和知识进行阐述,根据实际情况设计跟踪控制设备,并引入相关模型构建无驱动水上无人艇运动数学模型。为了有效简化控制的复杂性,通常从三个维度研究和分析水面无人艇的动力学模型。
第三部分建立在扰动观测设备的基础上对无人艇反步法跟踪设备进行研究,在设计轨迹跟踪系统中引入运动学电路控制规律和动力学电路控制原理。在此过程中,明确了提升跟踪系统性能的最终目的,在此基础上加速误差收敛速度,并将无人艇跟踪位置的误差导入系统中,构建虚拟速度控制模型。。在动力学电路控制规律设计部分中,基于扰动观测器的输出,来设计系统的最终控制律。
在第四部分中,构建Lyapunov函数分析系统的稳定性,使用Matlab数值模拟对控制设备的可行性和有效性进行验证,并与其他控制算法的模拟进行比较和验证。
第五部分给予总结和展望。总结全文,展望今后要深入研究的方向。
第2章 水面无人艇运动的数学模型
2.1引言
在设计该系统前期,需要建立关于无人艇的模型,该模型主要以控制系统的设计和模拟实验为基准。无法应用于实际船舶中,为此投入大量成本,解决该问题的基本方法是建立无人艇模型的基础上对控制系统性能进行计算。不过无法保证该模型参数计算过程中的精准度。这是因为实际的无人艇系统非常复杂。因此,在实际研究中,通常的方法仅需要构建的无人艇数学模型并符合控制系统的实际需求,其中需要合理简化数学模型,本章节构建的无驱动水上无人艇三维运动模型。
2.2 预备知识
在数学建模水面无人艇的过程中,涉及静态和动态两个方面。在此过程中,通过静态学的理论对水上无人艇的特性展开研究,其中需要确保恒定速度下的环境,动态学主要研究方向侧重于加速度运动环境下的无人艇特征。与之相反的是,在研究中引入动态学方法构建数学模型,能够确保描述运动状态的精确度和稳定性。水上无人艇的运动学原理涵盖动力学和运动学两大部分,运动学主要反映了水上无人艇的运动速度和位移之间的关联性,动力学主要反映无人艇作用力和运动速度之间的关联性。
2.3参考坐标系描述
本章节对水上无人艇运动时常规的坐标系,分别为艇体坐标系和惯性坐标系,两者具体关联性如图2.1所示。在此过程中,O和Ob分别是两个坐标系的原点,分别取地球表面某一点和艇体重心位置。从惯性坐标系的角度分析,x和y轴分别代表北向范围和东向方位,另外z轴主要指向地心。
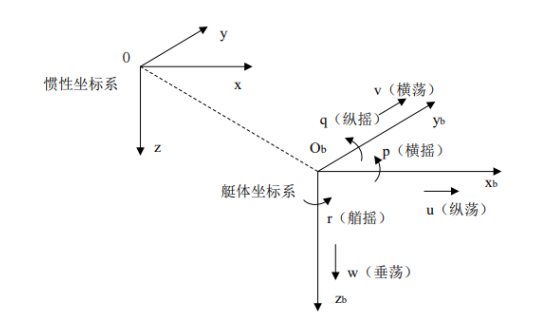
图 2.1 水面无人艇的坐标系(惯性坐标系和艇体坐标系)
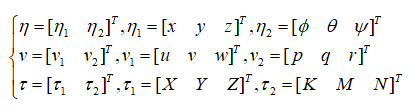
从图2.1所示的坐标系中不同变量关系分析,本次研究得出以下定义,水面无人艇在xb轴方向上所做的运动称为纵荡,该运动方向上所受到的力记为X,速度记为u,位置记为x;在yb轴方向上所做的运动称为横荡,该运动方向上所受到的力记为Y,速度记为 v ,位置记为 y;在zb轴方向上所做的运动称为垂荡,该运动方向上所受到的力记为Z,速度记为w,位置记为z。水面无人艇以xb轴为旋转轴所做的运动称为横摇,该运动方向上所受到的力矩记为K,转动角速度记为p,欧拉角记为Φ;以yb为旋转轴所做的运动称为纵摇,该运动方向上所受到的力矩记为M,转动角速度记为q,欧拉角记为 ;以b z轴为旋转轴所做的运动称为垂荡,该运动方向上所受到的力矩记为 N ,转动角速度记为r,欧拉角记为θ。为方便下文研究的开展,参照SNAME定义的水面无人艇基本运动变量,可得具有如下表达形式的运动量:
2.3 水面无人艇三自由度运动数学模型
综合考虑水下无人艇的浮力方向具有较强的稳定性,除此之外,无人艇本身的纵向和横向重心较高,所以其在运行过程中的垂荡、横摇等方向的运动相对比较小,因此在分析无人艇轨迹跟踪时,可排除一般性,仅围绕横荡、艏摇、纵荡三个自由度方向的运动状态展开研究即可。因此可定义水面无人艇速度状态向量为,位置状态向量为,并做如下假设:
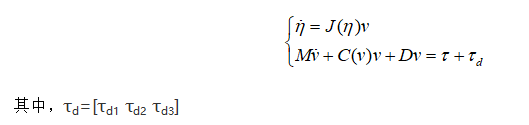
本次研究只综合考虑无人艇的纵荡、横荡、艏摇三个运动方向的性能和状态;无人艇的质量分布均匀,同时确保xy轴坐标始终处于对称状态; 水面无人艇的重心点和浮心点始终处于z轴位置; 在流体环境理想的状态下水面无人艇始终处于静止状态,在设定无人艇的坐标轴始终对称的情况下,可根据实际情况不考虑非对角项产生的影响,可设定矩阵M始终处于对称状态;推力及回转力矩向量为τ为τ=【τ10 τ3】T,本次研究的水面无人艇属于无驱动结构,无须配置横向驱动设备,因此设定第二个分量参数为0; 无须考虑矩阵M,D(v),C(v)的耦合项,同时忽略高于一阶项的水动力影响作用。根据上述研究假设,得出下图2.2所示的无驱动水上无人艇三个自由度的研究模型。综合考虑无人艇各类参数存在一定程度的未知性,本次研究模型可进行以下调整和转换。
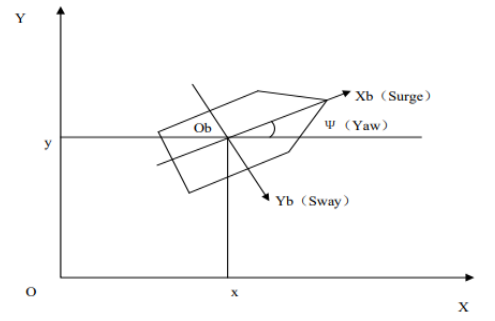
图 2.2 欠驱动水面无人艇平面运动模型
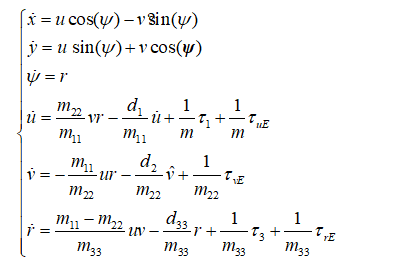
其数学表达式为:
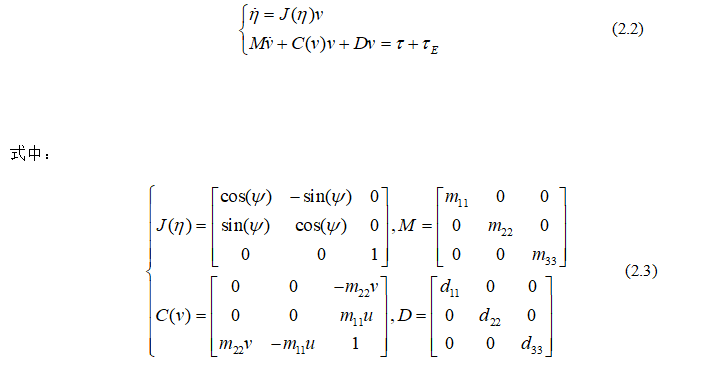
由此可知水面无人艇三自由度数学方程如下:
考虑到水面无人艇内部参数不确定性,动力学数学模型可做如下变形:
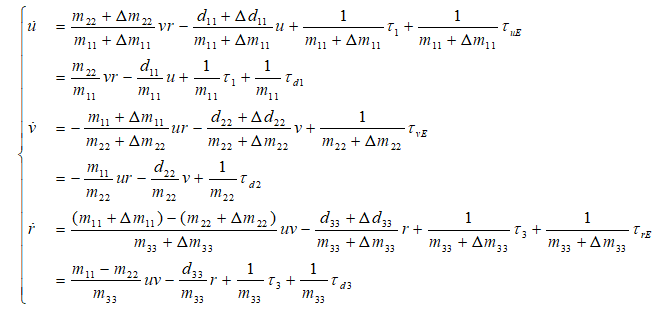
式中Δmii和Δdii表示水面无人艇的参数扰动项,用τd1、τd2、τd3表示无人艇内部参数扰动、外部因素扰动、总扰动,从而得出本次研究的无驱动无人艇三个自由度的研究模型是:
基于上述假设条件,得出本次研究无驱动水上无人艇三个自由度的运动模型,这一模型可准确客观反映无人艇处于纵荡、横荡、艏摇方向上的性能和状态,符合本次研究对轨迹跟踪控制设备的设计需求。
2.4 本章小结
本章节主要构建无人艇的数学模型,针对系统中出现的未知因素和外部干扰因素,可根据实际情况合理弱化相关复杂条件,构建无人艇三个自由度方向的研究模型。首先构建无人艇惯性坐标系以及固定坐标系。并在此基础上通过不同维度引入运动学和动力学原理,对无人艇的动态性能和特征进行简要概述,建立以运动学和动力学为原理的研究模型,并对其中的各项参数进行简要概述。
第3章 基于反步法的轨迹跟踪控制器设计
3.1 引言
迄今为止,国内外研究人员从不同维度对水面无人艇轨迹跟踪控制展开深入研究和分析,并得出大量有价值的研究结论。许多学者在Backstepping理论的基础上开展研究,将Backstepping应用于缺驱动水面无人艇轨迹跟踪控制具有一定的优势,主要是反步法是建立在Lyapunov函数形式的基础上设计的控制设备,具备较为可观的稳定性。如果遵循反步法设计跟踪控制系统的基础理论分析和证明系统的全局稳定性一些控制方法需要近似处理系统模型。不需要反向步骤方法,并且可以完全保持控制系统的非线性项。但是,根据反步法设计水面无人艇轨迹跟踪控制器同时存在缺陷。第一,由于欠驱动水面无人艇操作系统复杂程度较高,如果通过反步法设计控制设备,极易造成控制规律计算的难度增加,如果在设计中引入虚拟控制变量,则存在“微分爆炸”的概率。第二,在跟踪控制系统受到扰动因素的影响过程中,无法确保控制设备的整体效果,从而降低了对船体期望轨迹的跟踪精度。因此,实际上,如果单纯使用逆步骤法设计控制系统,无法保证控制设备的最终效果。综合考虑以上问题,本章节设计了关于扰动观测器的水面无人艇反步法跟踪控制设备,此类控制设备通过观测值实现对控制控制量进行相应的前馈补偿,能够有效提升无人艇的防扰动成效。控制设备的设计通常遵循运动学和动力学两个学科的控制规律。从运动学控制法则角度出发,为了有效加强系统跟踪的整体效果和稳定性,导入误差积分,并引入神经动态模型处理的虚拟速度控制规律,从而得出微分形式,有效规避速度跳跃、微分爆炸的风险概率。从动力学角度出发,可建立Lyapunov函数,设计旋转矩和向前推力的控制规律律。
3.2 前置工作
在设计反步法控制器之前,可以简单地设计一个针对无人艇航向保持的基于pid控制的控制器,如下是利用matlab的simulink工具箱搭建的无人艇航向控制系统仿 真框图
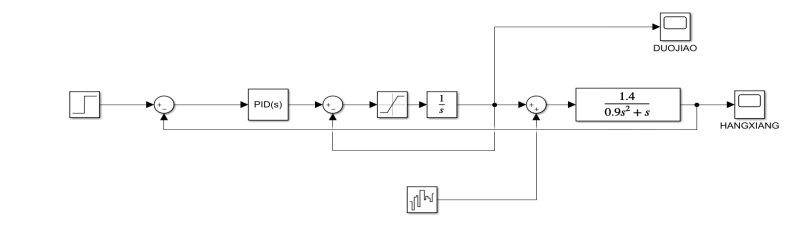
上图反映了航向作为阶跃输入,可转变30°,在不受外界因素干扰的假设条件下,仿真模拟曲线如下图所示。控制设备的控制阐述在多次优化和调整后取Kp=0.50,Ki=0.00005、Kd=0.90。在明确干扰项的假设条件下,控制设备的调节和上升时间普遍较短,并展现响应快、性能优良的优势,对航向有很好的控制效果。
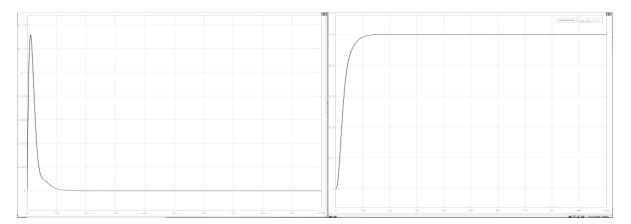
图3.2 无干扰下舵角、航向响应曲线
设定白噪声的强度为0.5,综合评价传统控制设备的整体性能,其主要参数可取Kp=0.50,Ki=0.00005、Kd=0.90,具体曲线结果如下所示。
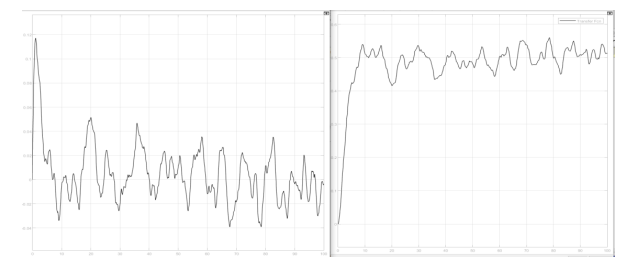
图3.3 有干扰下舵角、航向响应曲线
可以看出在有干扰时pid的控制效果比较差,所以非常有必要重新设计一个控制 器 ,正如本文所提到的基于反步法带扰动观测器的无人艇轨迹跟踪控制器。
3.3 反步法设计原理
在这一节中,具体介绍一下介绍反步法的设计原理,该反步法遵循递归原则,以建立科学合理的Lyapunov函数对设计控制设备。具体地,首先,可对其中的变量和误差进行分析和计算,构建合理的Lyapunov函数,在此基础上引入虚拟控制量,从而确保该函数导数为负数。在此基础上采用同一种方法得出后续的虚拟控制量,如此重复之后,并且可以通过反复多的步骤得出控制该设备的规律,以下是关于反步法设计流程的简要概述。
我们假设某个被控对象为:
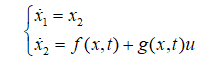
其中x1表示的是位置向量,x2表示为速度向量。定义一个位置误差向量z1=x1-zd,其中zd表示为期望位置。结合已有的被控对象系统模型,有:
![]()
![]()
首先,构造 Lyapunov 函数:

对其等式两边求导,可得:

根据求导结果,设计虚拟控制律z2=x2+c1z1-dzd,其中c1>0为控制器设计参数。 代入dV1 ,可得:
![]()
![]()
若z2=0 ,则有dV1 ≤0。为了能够使z2=0 ,构造 Lyapunov 函数:

对其两边求导,可得:

为了使dV2 ≤0 ,设计如下控制律:

其中,c2>0为控制器设计参数。代入dV2,可得:
![]()
![]()
考虑到z2=x2+c1z1-dzd,当z1→0、z2→0时,x2→dzd。综上所述,根据式(3.8)形式的控制规律,可推导出系统(3.1)的控制方法。
以上是对反步法设计过程的简要概述,在此过程中,Lyapunov 函数的构造是本次控制设备设计的核心部分。必须明确的是,将反步法引入无驱动系统运动控制时,在选取虚拟变量关系和处理部分问题过程中,需要结合辅助变量,综合考虑本次研究目标是无驱动水上无人艇,设计控制设备中存在同类型问题,因此具体的解决思路和解决方法在后续的论述中得出。
3.4 控制器设计
本章节主要以建立扰动观测器为基础的水面无人艇反步法轨迹跟踪控制设备,其中需要结合扰动观测设备的相关数值对其进行一定程度的前馈补偿,从而有效提升无人艇抗干扰性能,加强系统的抗干扰能力。
3.4.1 问题描述
设水面无人艇的理想轨迹是ηd(t),应当在设计前期得出,并设定相应的假设条件:

假设3.3:模型参数存在一定程度的未知性,不过需要符合Δmii与Δdii小于其对应参数的10%的条件。
假设3.4:水面无人艇的控制输入和速度均有界。
控制目标:在确保假设4.1、4.2、4.3、4.4均成立的基础上,构建水上无人艇非线性模型(2.6),本次设计中装载了扰动观测设备,并引入反步法的轨迹跟踪控制设备,为无人艇在处于各类干扰因素的情况下顺利完成跟踪任务。
本章节控制设备框架图如下图3.4所示
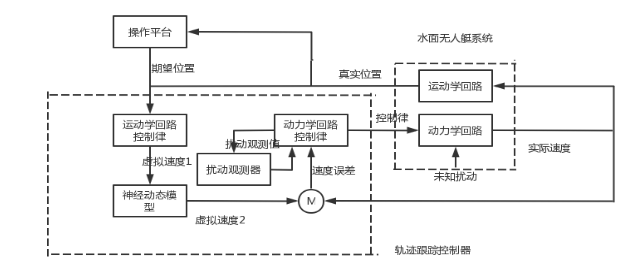
图3.4基于扰动观测器的反步法轨迹跟踪控制器设计
3.4.2扰动观测器设计
综合考虑水下无人艇轨迹跟踪,受到外部因素和未知因素等综合影响,上述扰动将影响控制系统的整体性能,严重的甚至导致系统无法稳定运行。基于此,针对无人艇系统模型设计扰动观测器,应当从三个自由度方向的扰动展开全面计算和评估。
以下为扰动观测设备的设计流程。
首先设计:

自此,关于扰动观测设备的设计流程全部结束,该观测设备能够全面客观评估系统扰动性能,同时根据实际控制量进行前馈补偿。
3.4.3控制器设计
本章节综合扰动观测设备的输出设计基于扰动补偿的轨迹跟踪控制器,主要分两步展开,分别运用到运动学和动力学的控制规律。在设计阶段,可针对误差积分项引入其中,并融合神经动态模型技术,能够从根本上提高系统整体性能,规避传统控制器中存在微分爆炸的风险。
根据上一章节的扰动观测设备输出![]()
![]() 作为专门的控制补偿,进而得出控制律是:
作为专门的控制补偿,进而得出控制律是:
下面根据式(4.17)设计控制律![]()
![]()
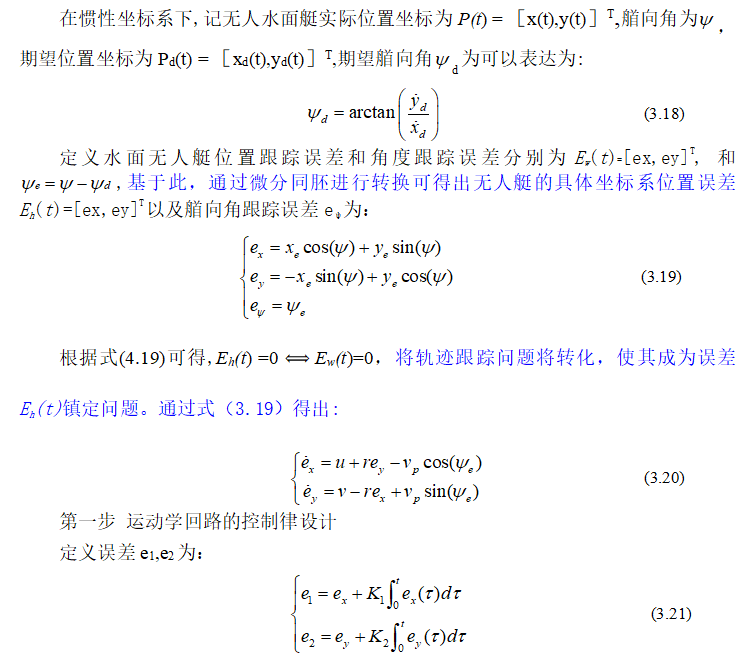
这是因为位置误差积分项的引入过程中,从不同维度提升系统动态性能和精准度。为了获得能够准确定位无人艇位置的坐标P以及遵循运动学控制律,可建立Lyapunov的函数:
本次研究目标为无驱动水面无人艇,其处于横荡方向过程中没有控制输入,而在其他两个方向存在控制输入,基于此,应当设定r为控制输入,此举能够实现对横荡方向的误差控制目的,也是最大限度规避引入横向速度之后造成过于依赖![]()
![]() 的持续激励条件,因此在这里引入相应的辅助变量:
的持续激励条件,因此在这里引入相应的辅助变量:
![]()
![]()
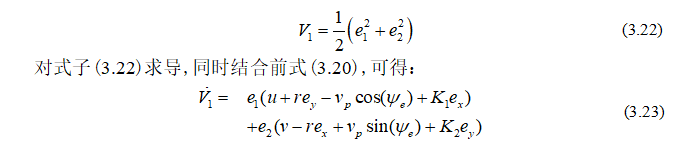
可将u和h作为虚拟控制输入,确保上述控制律分别是ud与hd,为实现位置误差ex与ey的收敛,设计:

式中,A1,A2,K1以及K2均属于正常数范畴,在后续的控制设备设计阶段需要通hd求导获得导数形式,出于规避重复多次求导的复杂性,可将hd通过相应的神经动态模型获得虚拟控制量hf:
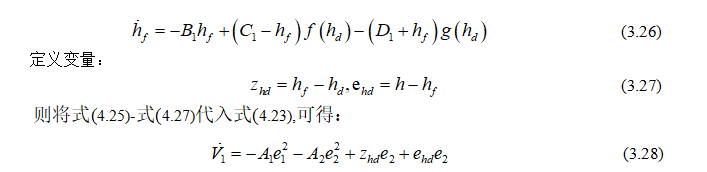
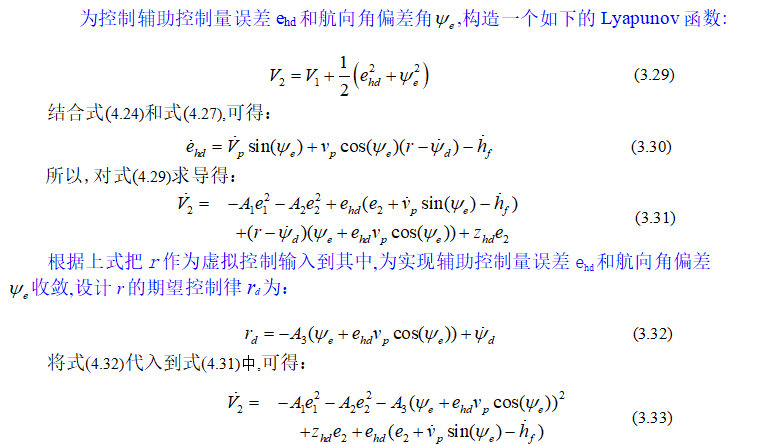
综上,通过构造Lyapunov函数,设计出了如式(3.25)和式(3.32)所示的运动学回路控制律。
第二步 动力学控制律设计
为了避免动力学控制律设计过程中对ud和rd作复杂的求导运算,将ud和rd各自通过一个神经动态模型,得到新的虚拟控制输入uf和rf:
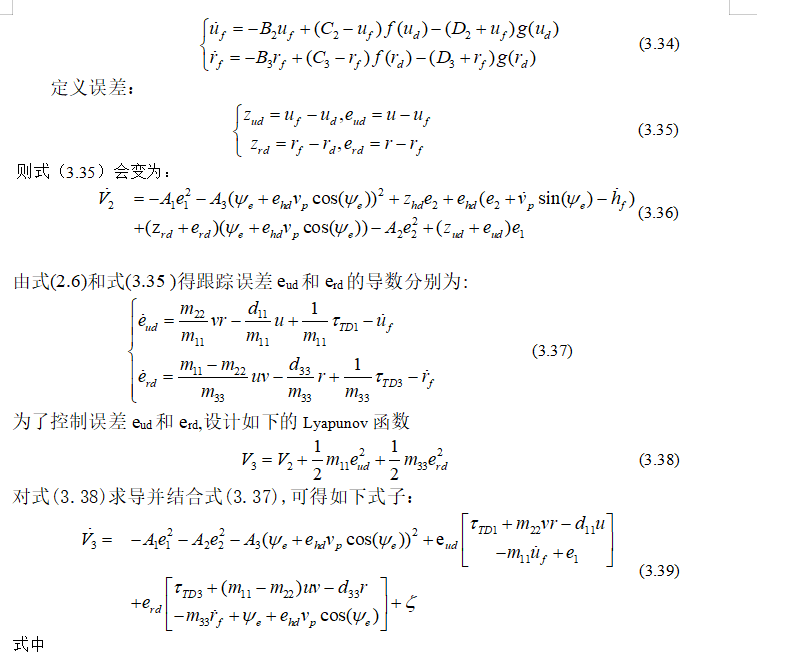
综上所述,通过Lyapunov函数模型可得出水上无人艇轨迹跟踪控制设备设计公式为![]()
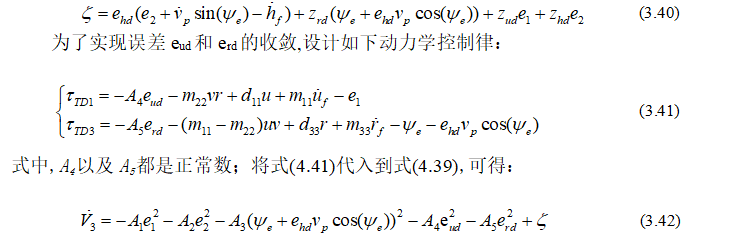
![]() 在设计过程中由于引入位置误差积分项,并通过动力学控制律设计时采取相应的前馈补偿,因此在控制设备的综合影响下,水上无人艇可有效抵抗多种因素的干扰,具体的控制效果在后续研究中得以验证。式(3.42)最后一项和相关函数的稳定性也需要在后续的研究中展开研究和分析。
在设计过程中由于引入位置误差积分项,并通过动力学控制律设计时采取相应的前馈补偿,因此在控制设备的综合影响下,水上无人艇可有效抵抗多种因素的干扰,具体的控制效果在后续研究中得以验证。式(3.42)最后一项和相关函数的稳定性也需要在后续的研究中展开研究和分析。
3.5本章小结
为了有效解决反步法实际应用阶段计算量过大,无法发挥防止扰动的问题,本章节针对该问题提出扰动观测设备反步法跟踪控制设计方法。这种方法通过扰动观测器对无法确定的扰动因素进行预估和判断,并根据实际情况进行相应的前馈补偿,最大限度降低扰动对系统造成的负面影响。在设计控制设备时,需要应用到位置误差积分项,本章节专门设计了虚拟速度控制规律,从而有效提升系统的整体性能和跟踪精确度。除此之外,为了最大限度规避系统出现速度跳跃和微分爆炸的风险,特此引入神经动态模型对虚拟控制量进行处理。
第4章 稳定性分析及仿真验证
4.1 引言
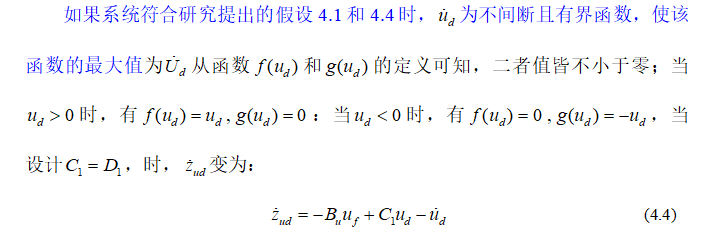
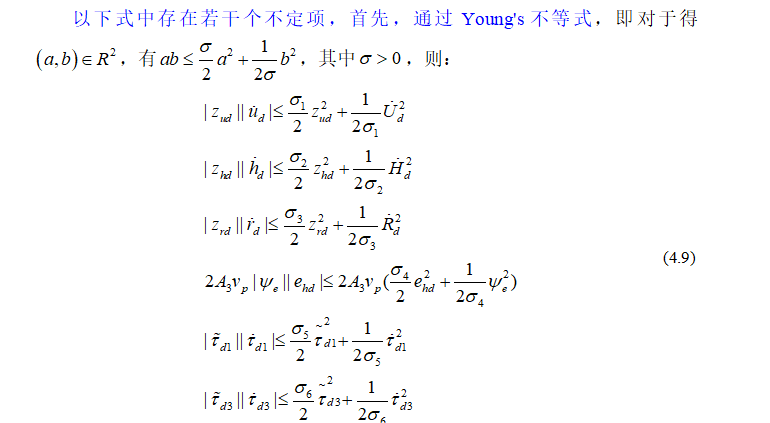
对于给定的控制系统,稳定性是系统的重要特性。稳定性是系统正常工作的前提,是系统的动态属性,表明系统受到外部扰动而脱离原始平衡状态,并且是在扰动消失之后系统本身具有恢复到原始平衡状态的能力的顽固性。李雅普诺夫稳定性理论研究了扰动下平衡点的稳定性问题,其分析系统稳定性法有两种,分别是李雅普若夫第一法(间接法)和李雅普若夫第二法(直接法)。本章将利用第二法直接构造一个特定的Lyapunov函数来分析水面无人(2.6)在控制器![]()
![]() 作用下的稳定性问题。并且在Matlab上对控制器的效果进行验证,并且与参考期望轨迹进行比较,来验证此控制器的效果。
作用下的稳定性问题。并且在Matlab上对控制器的效果进行验证,并且与参考期望轨迹进行比较,来验证此控制器的效果。
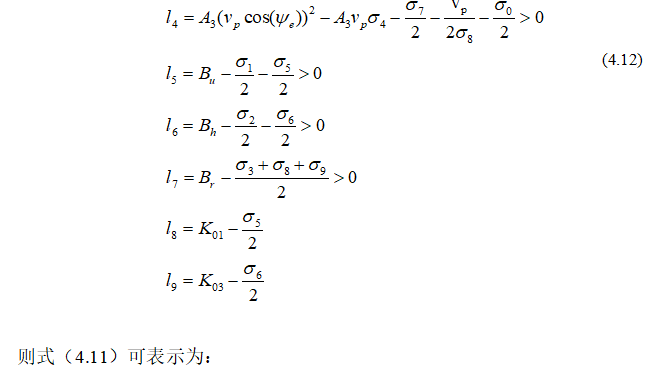
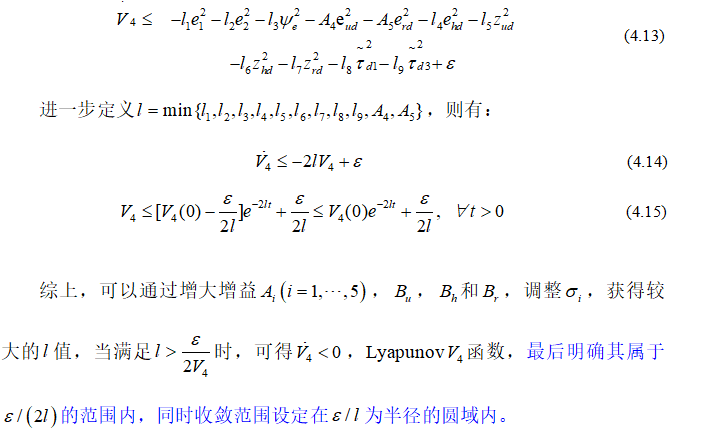
4.2 稳定性分析
通过式(2.6)中表示的无人艇系统,必须通过计算和模型验证如果采取![]()
![]() 的形式开展扰动观测器的无人艇反步法轨迹跟踪设计,将会造成系统内部多项跟踪误差收敛速度无限接近于0,同时需要设定控制系统属于稳定状态,以下是主要的证明流程。
的形式开展扰动观测器的无人艇反步法轨迹跟踪设计,将会造成系统内部多项跟踪误差收敛速度无限接近于0,同时需要设定控制系统属于稳定状态,以下是主要的证明流程。
从水上无人艇系统而言,建立Lyapunov函数:
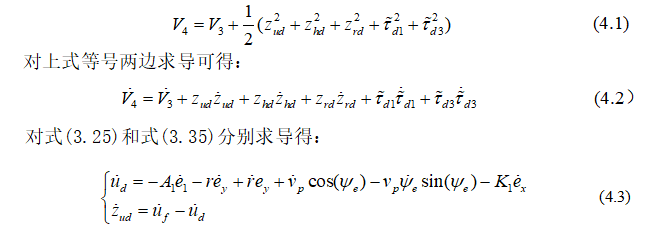


为了对本章节设计的轨迹跟踪设备的可行性和有效性进行验证,本小节通过式(2.6)模型结构对无人艇展开的分析和研究,并合理引入相关参考数据。
4.3 仿真验证
当处于仿真模拟的环境下,由正弦信号和常值构成扰动因素参数,具体形式如下[35],其中:m11=200,m22=250,m33=80,d11=70,d22=100,d33=50 。
在仿真环境中,考虑扰动由常值和正弦信号组成,具体形式如下:
为了确保仿真试验具有一定典型性,本次研究构建的数学模型设定轨迹为ηd,并根据(xd,yd)得出期望轨迹,从而得出表达式为: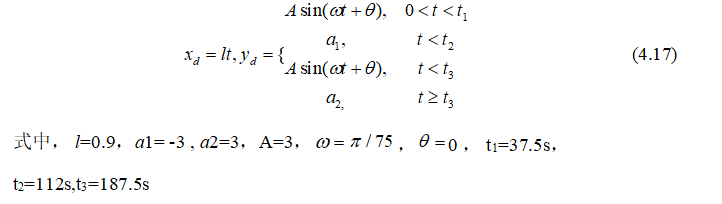
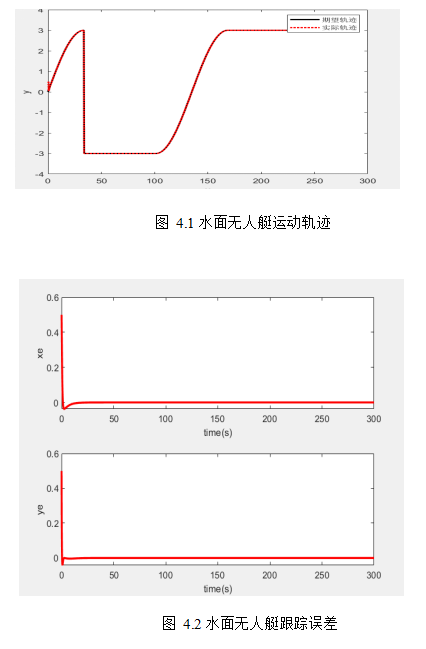
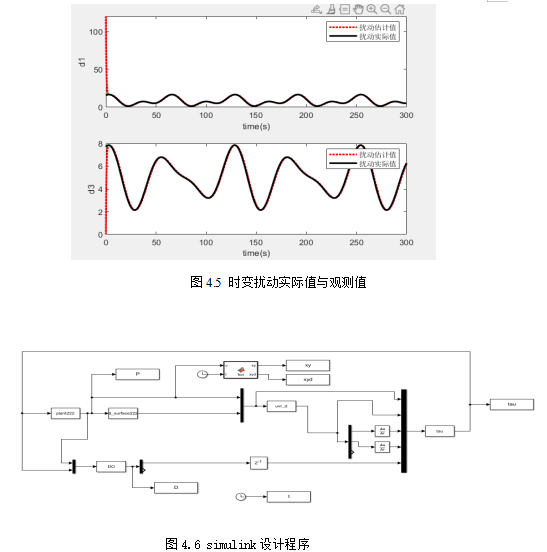
从图4.1不难发现当系统受到扰动的环境下,本章节设计的控制设备可有效促进无人艇达到预期的跟踪轨迹中;图4.2说明无人艇跟踪误差可根据实际要求的快速调整收敛速度;图4.3体现控制输入的情况下无人艇速度与曲线保持一致,值得关注的是,虽然无人艇横荡方向并没有设置控制输入,不过速度还是能够在极短时间内达到小幅波动的范围,很大程度是受到τ1和τ3共同作用下出于防止外部扰动因素的影响而产生的横向速度。图4.4可得出无人艇控制输入为τ=[τ1,0,τ3],图4.5得出无人艇对外部扰动因素和贯彻设备的估计结果。从该图可以看出,本章设计的扰动观测器能够快速精准地对扰动进行实时估计。图4.6为simulink的反步法设计程序。总的来说,从各个仿真结果可以看出,无人艇实际轨迹能一直沿着参考轨迹航行,误差收敛快,速度v响应好,扰动实际值的随时间变化曲线和扰动估计值一样,因此可以说明本章节涉及的控制方法对跟踪进度的要求比较高,同时必须确保速度和控制输入出于平稳状态。
4.4 本章小结
本章利用Lyapunov方法进行系统的稳定性分析,证明了一旦依据![]()
![]() 的形式涉及水上无人机反步法轨迹跟踪控制设备,系统中的每一项误差收敛速度到0的范围,且控制系统出于稳定运行状态。最后在MATLAB中用simulink设计了轨迹跟踪仿真实验,实验结果表明所设计的控制器能够使无人艇在较短的时间内实现对期望轨迹的精确跟踪并且误差收敛快,速度v响应好,扰动实际值的随时间变化曲线和扰动估计值一样,验证了所设计算法的有效性。
的形式涉及水上无人机反步法轨迹跟踪控制设备,系统中的每一项误差收敛速度到0的范围,且控制系统出于稳定运行状态。最后在MATLAB中用simulink设计了轨迹跟踪仿真实验,实验结果表明所设计的控制器能够使无人艇在较短的时间内实现对期望轨迹的精确跟踪并且误差收敛快,速度v响应好,扰动实际值的随时间变化曲线和扰动估计值一样,验证了所设计算法的有效性。
第5章 总结与展望
5.1总结
综合考虑无人艇的机动性和灵活性,同时可根据不同使用需求进行拓展,其在海洋资源勘探领域发挥极为关键的作用,它能实现水下勘测、海面监控、海上通信等多种任务,受到各国学者的高度关注。水上无人艇轨迹跟踪控制设备可确保无人艇运行轨迹符合预期效果,并展现出广阔的发展空间。
本次研究基于水面无人艇轨迹跟踪控制器设计展开多维度、深层次的分析和研究,主要研究框架如下:
(1)以动力学和运动学为切入点对水面无人艇的动态形态展开研究,并与轨迹跟踪控制机的设计要求进行有机融合,构建基于水面无人艇三自由度运动模型。
(2)综合考虑反步法在有效解决非线性系统控制问题中发挥的作用和价值,其能根据实际情况最大限度保留非线性属性,进而真实还原控制系统与被控制目标的匹配程度,不过根据该原理设计的控制设备存在计算量过大、难以抵抗外界干扰等劣势,本次研究中根据扰动观测器设计水上无人艇反步法轨迹跟踪控制器。该设备在设计过程中需要采用运动学和动力学的回路原理。 开展控制设备设计工作之前,需要设定扰动观测器中无法确定的扰动因素,该步骤的作用在于能够有效控制从而进行前馈补偿。从运动学角度出发,可利用微分同胚方法转换坐标系,此举能够有效提升跟踪系统的运行过程中的整体性能和精确度,同时引入位置误差积分项,其作用在于设计虚拟速度控制律。在此之后,通过构建神经动态模型处理虚拟速度控制律等相关问题,从中得到虚拟速度的微分形式,最大限度规避速度跳跃和微分爆炸的风险概率。从动力学角度出发,依据神经动态模型的输出,建立李雅普诺夫函数。
5.2展望
无驱动水上无人艇的轨迹跟踪控制属于系统程度较高,流程复杂的研究课题,需要结合多门学科理论知识,由于本次研究篇幅有限,本文仅从部分方向进行研究,在后续的研究中需要不断强化研究深度和广度,并结合多门学科的专业理论知识,具体可总结以下几个方面:
(1)为了确保控制设备的设计精准度和稳定性,本次研究提出多项假设条件,其中包括理想轨迹不间断,并得出无人艇轨迹跟踪的具体流程。不过在实际使用过程中,却存在预期轨迹分散或不光滑等现象,基于此,在今后的研究中应当将不光滑的无人艇跟踪轨迹纳入重点研究方向。
(2)本次研究设定无人艇的数学模型始终处于对称状态,不过在实际运动阶段,极易出现模型不对称的现象,这无形中导致试验模型与实际运用的无人艇力学特征存在较大差异,从而导致控制设备无法达到预期效果,这也是今后研究中必须深度挖掘和研究的方向。
(3)水上无人艇单艇完成任务的能力难以保证,在实际应用场景中,大部分需要的通过多艘无人艇协同合作执行任务。这其中涉及编队控制的问题,需要筛选科学合理的控制策略,才能实现多艇协同完成任务的目的,真正发挥无人艇的价值和作用,这是今后需要持续研究的方向。
由于本人研究能力有限,研究深度不足,本次研究中如有不妥之处,恳请各位导师批评指正。
参考文献
[1]马善伟.无人艇发展现状及启示[A].中国科学技术协会、广东省人民XX.第十七届中国科协年会一一分6中国海洋工程装备技术论坛论文集[C].中国科学技术协会、广东省人民XX:中国科学技术协会学会学术部,2015:6.
[2]黄西密.无人艇建模及操纵运动仿真的研究[D].大连海事大学,20l5.
[3]李家良.水面无人艇发展与应用[J].火力与指挥控制,2012,37(06):203-207.
[4]张树凯,刘正江,张显库,刘玉.无人船艇的发展及展望[J].世界海运,20l5,38(09): 29-36.
[5] 邱荷珍, 王磊, 王洪超. 船舶轨迹跟踪研究综述[J]. 实验室研究与探索, 2014, 33(04): 4-8-36.
[6] 王茹. 欠驱动船舶轨迹跟踪的自适应滑模控制研究[D]. 大连海事大学, 2018.
[7] E. Borhaug, A. Pavlov, E. Panteley, K. Y. Pettersen. Straight line path following for formations of underactuated marine surface vessels [J]. IEEE Transactions on Control Systems Technology, 2011, 19(3): 493-506.
[8] N. Khaled, N. G. Chalhoub. uidance and control scheme for under-actuated marine surface vessels [C]. American Control Conference, 2010, 5230-5235.
[9] 李鹏. 基于滑模自抗扰的无人水面艇路径跟踪控制研究[D]. 大连海事大学, 2017
[10] So-Ryeok Oh, Sun J. Path following of underactuated marine surface vessels usingline-of-sight based model predictive control[J].Ocean Engineering, 2010, 37 (2-3):289-295.
[11]Zhao H, Shen J. Path following control of underactuated ship based on nonlinear
[12] Skjetne R, Fossen T I. Nonlinear maneuvering and control of ships[C].Proceedingsof OCEANS 2001 MTS; IEEE Conference and Exhibition, Honolulu, USA, 2001:1808-1915.
backstepping[C].Proceeding of the TEEE International Conference on Information andAutomation, Yinchuan, China, 2013:1-6.
[13]Do K D, Jiang Z. J. Pan. Robust adaptive path following of underactuated ships[J].Automatics, 2004, 40(6):929-944.
[14] Do K D, Pan J. Global robust adaptive path following of underactuated ships[J].Automatics, 2006,42 (10):1713-1722.
[15] Su R, Liu Z, Li T S, et al. Path following of underactuated surface ships. AmericanControl Conference Hyatt Regency Riverfront[C].American Control Conferenca HyattRegency Riverfront,St. Louis, M0, USA,2009:151-756.
[16]沈智鹏,代昌盛.久驱动船舶路径跟踪的强化学习迭代滑模控制[J].哈尔滨工程大学学报,2017, 38 (5) :697-704.
[17]刘杨,郭晨,沈智鹏,等.欠驱动船舶路径跟踪的神经网络稳定自适应控制[J].控制理论与应用,2010, 27 (2) :000169-174.
[18] Wang H, Wang D, Peng Z H, et al. Adaptive neural control for cooperative pathfollowing of marine surface vehicles:state and output feedback[J].InternationalJournal of Systems Science, 2016; 47 (2):343-359.
[19] Do K D, Pan J. State-and output-feedback robust path-following controllers for underactuated ships using Serret–Frenet frame[J]. Ocean Engineering, 2004, 31(5-6): 587-613.
[20] Aguiar A P , Hespanha J P . Logic-based switching control for trajectory-tracking and path-following of underactuated autonomous vehicles with parametric modeling uncertainty[J]. Proceedings of the American Control Conference, 2004, 4:3004-3010.
[21] Aguiar A P , Hespanha J P . Trajectory-Tracking and Path-Following of Underactuated Autonomous Vehicles With Parametric Modeling Uncertainty[J]. IEEE Transactions on Automatic Control, 2007, 52(8):1362-1379.
[22] Ashrafiuon H, Muske K R, McNinch L C, et al. Sliding-mode tracking control of surface vessels[J]. IEEE transactions on industrial electronics, 2008, 55(11): 4004- 4012.
[23] Burger M, Pavlov A, Pettersen K Y. Curved trajectory tracking for surface vessels under constant external disturbances[J]. IFAC Proceedings Volumes, 2010, 43(16): 467-472.
[24] Movahhed M, Dadashi S, Danesh M. Adaptive sliding mode control for autonomous surface vessel[C]//2011 IEEE international conference on mechatronics. IEEE, 2011: 522-527.
[25] Fahimi F, Van Kleeck C. Alternative trajectory-tracking control approach for marine surface vessels with experimental verification[J]. Robotica, 2013, 31(01):25-33.
[26] Valenciaga F. A second order sliding mode path following control for autonomous surface vessels[J]. Asian journal of Control, 2014, 16(5): 1515-1521.
[27] Ghommam J, Mnif F. Robust Adaptive Manoeuvering Control of an Autonomous Surface Vessel in the Presence of Ocean Currents and Parametric Model Uncertainty[M]//Applications of Sliding Mode Control. Springer, Singapore, 2017: 119-134.
[28] Van M. An enhanced tracking control of marine surface vessels based on adaptive integral sliding mode control and disturbance observer[J]. ISA transactions, 2019.
[29] 李铁山, 洪碧光. 船舶航迹控制的鲁棒自适应模糊设计[J]. 控制理论与应用, 2006, 24(3):445-448.
[30] 张国庆,张显库,关巍.欠驱动船舶简捷鲁棒自适应路径跟踪控制[D] , 2014.
[31] Yang Y, , Liu H B. A trajectory tracking robust controllerof surface vessels with disturbance uncertainties[J].IEEE Transactions on Control Systems Technology, 2014, 22(4): 1511- 1518.
[32] QuY, XiaoB,FuZ,etal.Trajectory exponential tracking control of unmanned surface ships with external disturbance and system uncertainties[J]. ISAtransactions, 2018, 78: 47-55.
[33] Zhu G, Du J. Global robust adaptive trajectory tracking control for surface ships under input saturation[J]. IEEE Journal of Oceanic Engineering, 2018.
[34] Sun Z, Zhang G, Qiao L, et al. Robust adaptive trajectory tracking control of underactuated surface vessel in fields of marine practice[J]. Journal of Marine Science and Technology, 2018, 23(4): 950-957.
[35] 胡云艳. 欠驱动水面无人艇的航迹跟踪控制研究[D]. 哈尔滨工程大学, 2011.
致谢
为期大约半年的本科生毕业设计阶段是我人生中最宝贵的时光,是我铭记一生的学生阶段。在这个阶段,我的学习和科研能力都得到很大提升,无论是在见识和思想深度上都得到了长足的发展。在这段时光中,无论是在学习还是生活都得到了老师、同学的无私帮助,本文能够顺利的完成,与他们的帮助是分不开的,在此我深深地表达对他们的感谢。
我要向我的指导老师慕东东教授表达我最真挚的感谢。感谢老师在本科毕设阶段对我的培养和教导。是老师孜孜不倦的教诲,让我很快适应了毕设的节奏并且逐步理解和掌握了撰写论文所需要的理论知识和仿真技术。在论文中遇到困难时,老师都会召开腾讯会议一对一的来教导我们,不厌其烦地帮助我解决问题,并且,在这个过程中,我们的科研能力不断地提高。本文从选题到理论研究和方法实现过程中,都得到了老师的悉心指导,使我受益匪浅。
感谢我的检查老师,在中期检查时,因为前期工作不足,论文进度十分滞后,老师对我提出了批评和许多建议,让我迅速找到了重点研究方向,加快了论文工作进度。
感谢我的父母,感谢父母对我无私的关爱和帮助。因为疫情不能返校而不得不呆在家里,论文撰写期间没有去做很多的家务活,他们并没有对我打骂和嫌弃,反而为我尽心准备各种美食,让我有力量去写毕设。
我要感谢我的沈心乐学长。感谢他在Matlab的控制器仿真中对我的帮助和教导,衷心地祝愿他学业有成、前途无量。
我要感谢我的母校大连海事大学,我人生最美好的时光留在了母校。庄严的罗马柱、美丽的司南广场、图书馆前的孔子雕像、冬日里充满青春气息的舞动的西山操场、拥有各种美食的第五食堂和心海餐厅、夏日里清澈的心海湖,这些都成为了我美好的记忆。我的母校见证了我的成长和蜕变,让我收获了宝贵的知识和创新的精神。
最后,向在我本科毕设期间曾经帮助过我的老师、同学、家人、学长表示最真诚的感谢。

1、如文档侵犯商业秘密、侵犯著作权、侵犯人身权等,请点击“文章版权申述”(推荐),也可以打举报电话:18735597641(电话支持时间:9:00-18:30)。
2、网站文档一经付费(服务费),不意味着购买了该文档的版权,仅供个人/单位学习、研究之用,不得用于商业用途,未经授权,严禁复制、发行、汇编、翻译或者网络传播等,侵权必究。
3、本站所有内容均由合作方或网友投稿,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。如您付费,意味着您自己接受本站规则且自行承担风险,本站不退款、不进行额外附加服务。
原创文章,作者:打字小能手,如若转载,请注明出处:https://www.447766.cn/chachong/67194.html,